


A320 unreliable airspeed and barometric altitude

Thread Starter
Join Date: Jan 2013
Location: Utopia
Age: 46
Posts: 67
Likes: 0
Received 0 Likes
on
0 Posts
A320 unreliable airspeed and barometric altitude
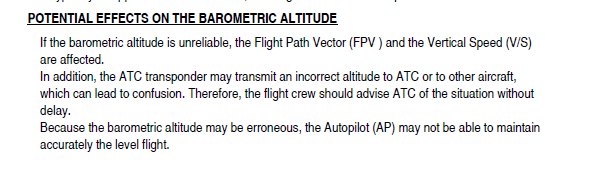
Above is the excerpt from the FCTM regarding the relationship between barometric altitude, FPV and VS. I don't understand the connection. If you were to read the FCOM DSC-34-NAV-10-10 P1/4, it's the IR part which supplies FPV and the barometric altitude is supplied by the ADR. In the case of UAS, the ADR would be the culprit and IR part which supplies FPV should still be reliable according to my understanding. Appreciate your inputs on this. Thanks

If it’s anything like the Boeing 777, I think the change of opinion was due to the fact that in certain failure modes, the FPV could be unreliable. I assume that it’s easier to write a checklist that assumes the worst possible case rather that trying to diagnose all the different failure modes while flying the aircraft whilst potentially not having any reliable instruments in IMC.
(All IMHO of course)
(All IMHO of course)
Only half a speed-brake
Well spotted.
The FPV does show angle relative to barometric reference, e.g. for cold temperatures it gets affected same as the altimeters. For a short time, FCOM even had a table for angular correction.
By observation, the FPV is not geometric. FCOM is remarkably silent on how or why.
The FPV does show angle relative to barometric reference, e.g. for cold temperatures it gets affected same as the altimeters. For a short time, FCOM even had a table for angular correction.
By observation, the FPV is not geometric. FCOM is remarkably silent on how or why.
Join Date: Jun 2007
Location: Wanderlust
Posts: 3,407
Likes: 0
Received 0 Likes
on
0 Posts
FDIn 2013 Airbus came out with a mod that in case of loss of all ADRs it uses hibrid GPIRS data so FPV remains available. So these aircraft can use the bird if available.
Join Date: Mar 2012
Location: Having a margarita on the beach
Posts: 2,424
Likes: 0
Received 0 Likes
on
0 Posts
Above is the excerpt from the FCTM regarding the relationship between barometric altitude, FPV and VS. I don't understand the connection. If you were to read the FCOM DSC-34-NAV-10-10 P1/4, it's the IR part which supplies FPV and the barometric altitude is supplied by the ADR. In the case of UAS, the ADR would be the culprit and IR part which supplies FPV should still be reliable according to my understanding. Appreciate your inputs on this. Thanks
we discussed it a couple of years ago?
Check HERE
Join Date: Jun 2009
Location: Mars
Posts: 87
Likes: 0
Received 0 Likes
on
0 Posts
The FPA is calculated using Vzbi, also called baro-inertial vertical speed, a parameter that uses both barometric and inertial vertical speed. The exact formula is FPA=arctan(Vzbi/groundspeed). So, if the barometric altitude is unreliable, Vzbi is unreliable, and the FPA will also be unreliable. If all ADRs are turned off, Vzbi is replaced by GPS parameters.
Join Date: Jun 2007
Location: Wanderlust
Posts: 3,407
Likes: 0
Received 0 Likes
on
0 Posts
Description of Changes: This paragraph provides the description changes introduced in this standard L4.2 compared to the previous standard L4.1: � The FLIGHT PATH ANGLE (FPA): In normal operations, the FPA is computed with vertical parameters that are based on baro-inertial data. In the case of all ADR loss, these vertical parameters (baro-inertial) are no longer available. The L4.2 standard allows to replace these vertical parameters in the computation of the PFA by hybrid vertical parameters based on GPIRS (mixed of the IRS position and GPS position). A hybrid FPA is calculated using hybrid vertical parameters. It is substituted to the classic FPA and transmitted to be displayed as a backup parameter. As a consequence, if all ADRs are turned off, the FPA is still available. There is no difference in the display on the FCU and FMA between the classic and the hybrid FPA. Therefore the FPV (bird) is based on the FPA. If all ADRs are turned off, the FPV (bird) will be still available thanks to the hybrid FPA. � Improvement of the Vzbi behaviour: The Vzbi is the vertical speed indicated on the PFD. In case of ADR source switch, the Vzbi behaviour is modified in order to avoid a temporary jump of Vzbi. There is a continuity of the Vzbi value even during the switch. Note: The mixability of the ADIRU Block III at Standard L4.2 with another ADIRU standard is allowed following the conditions and limitations detailed in the SIL 34-070.
Join Date: Jun 2009
Location: Mars
Posts: 87
Likes: 0
Received 0 Likes
on
0 Posts
The OP is not asking about the Hybrid FPV. He wants to understand the relationship between barometric altitude, FPV, and VS. The key is that VS is actually Vzbi, and the FPV uses Vzbi in its calculation. Vzbi is a mix of barometric and inertial vertical speed. It's a different topic than the L4.2 mod. The OP's fleet may or may not have the L4.2 MOD embodiment anyway; half the fleet at my operator doesn't.
Last edited by CrazyStuntPilot; 26th Feb 2022 at 15:40.
Join Date: May 2007
Location: FL390
Age: 38
Posts: 224
Likes: 0
Received 0 Likes
on
0 Posts
Maybe this stuff has been discussed again, sorry to repeat again.
As far as I am aware, VS uses both inertial and baro data. Inertial is for initial movement & disturbance. Where this is not available, the VS value is boxed amber. This is visible when gusty on ground with ADIRS not aligned yet. These changes in pressure make the VS going up and down like crazy. On the other side, baro data is used for the subsequent constant rate of change that is achieved (altitude change).
Thats why FPV is affected. Because FPV uses both VS and groundspeed to calculate the angle displayed in the PFD. If the Baro altitude is unreliable, VS is unreliable. And while instantaneous VS may be correct, the subsequent value would be a non sense one.
Slightly off topic but this conversation reminds me another common debate and misunderstanding: Many confuse the ISIS diagram on FCOM because it shows a data feeding from ADIRS3 to the ISIS. So many are interpreting wrongly that ADIRS3 feed the ISIS with IR data, but, this is only for the optional mod that incorporates heading information to the ISIS (yes, from IR3). ISIS is feeded with static and dynamic pressure from the STBY probes and ports. It generates its own attitude, and thats the purpose of a STBY instrument. No involvement of ADR3 here.
As far as I am aware, VS uses both inertial and baro data. Inertial is for initial movement & disturbance. Where this is not available, the VS value is boxed amber. This is visible when gusty on ground with ADIRS not aligned yet. These changes in pressure make the VS going up and down like crazy. On the other side, baro data is used for the subsequent constant rate of change that is achieved (altitude change).
Thats why FPV is affected. Because FPV uses both VS and groundspeed to calculate the angle displayed in the PFD. If the Baro altitude is unreliable, VS is unreliable. And while instantaneous VS may be correct, the subsequent value would be a non sense one.
Slightly off topic but this conversation reminds me another common debate and misunderstanding: Many confuse the ISIS diagram on FCOM because it shows a data feeding from ADIRS3 to the ISIS. So many are interpreting wrongly that ADIRS3 feed the ISIS with IR data, but, this is only for the optional mod that incorporates heading information to the ISIS (yes, from IR3). ISIS is feeded with static and dynamic pressure from the STBY probes and ports. It generates its own attitude, and thats the purpose of a STBY instrument. No involvement of ADR3 here.
Thread Starter
Join Date: Jan 2013
Location: Utopia
Age: 46
Posts: 67
Likes: 0
Received 0 Likes
on
0 Posts
sonicbum. Yes, this topic was discussed earlier and I also recollect your reply with the formula FPA=arctan(Vzbi/GS). I thought of generating more response to make it a little more easier to explain without the Vzbi term. But, I guess Vzbi it is!! Thank you for the reply.
