


AF 447 Search to resume

Joined: Jan 2005
Posts: 1,916
Likes: 0
From: W of 30W
Originally Posted by TheShadow
The above debate disregards where the THS may have been trimmed to and what instantaneous pitch effect it may have had upon the aircraft at autopilot disconnect. That's another ball-of-wax that's unclear to me. i.e. where's the THS being trimmed to when the datum indicated airspeed is artificially low - and how much deflected elevator can the autopilot's baro-hold handle in order to maintain the dialled in flight level (before disconnecting)?
The reappearance of the flight directors on the PFD when two air speeds will be calculated that can lead the crew to rapidly engage the autopilot. However, these speeds, though of the same order, can be erroneous and weak and thus lead the autopilot to command movements of the flight control surfaces that are inappropriate for the real speed of the airplane.


Joined: Jul 2009
Aviation Qualifications: ATP+Mil
Posts: 1,587
Likes: 185
From: Not far from a big Lake
HN39 question:
I don't think they would have any choice. While in Normal Law, their control inputs would be largely overridden in a Vmo/Mmo protection pitch up. This protection goes away in Alt2 Law.
TheShadow says:
Hi Shadow. No guarantees that the Vmo/Mmo pitchup scenario was the cause, but if possible, it sure influences where to look for the aircraft and thus should be considered in the search plans.
Now, I sense a common mis-perception about pitot blockages in your writing.
Yes, if you block the pitot inlet only, the indications will drop. But, if you block both the inlet and the tiny bleed holes drilled into the pitot tube to clear moisture from the tube, you end up with trapped air in the pitot system and that is a different ball of wax. Once you have trapped air behind the blockage, you can build pressure. Both kinds of blockages can and have happened.
Now lets look at the energy balance involved in getting AF447 from cruise speed down to the water in approximately 5 minutes in a configuration resembling a deep stall impact (not stated specifically by the BEA but can be inferred from the BEA's Line of Flight statement and the condition of recovered wreckage). How do you burn up that much energy that fast? One of my initial realizations about this accident was that I would have been hard pressed to bleed off that much energy in an F-4, and an A330 is a much cleaner aircraft. The only reasonable scenario it seems to me, is that the wing was operating at such an AOA that it was acting as a giant speed brake. Any time spent operating in a Mach tuck condition and then somehow recovering to end up in a deep stall, would eat up a lot of the total time available to burn up energy.
Vmo=330 knots, Mmo= .86, but the aircraft was demonstrated to higher speeds during its certification. (I believe it was demonstrated to M.93 but I don't have the reference at hand). The aircraft would not exhibit tuck below its demonstrated Mach number. It seems unlikely that the aircraft would accelerate above its demonstrated Mach number in level flight without application of a whole lot of power for a number of minutes that likely exceeds the ability of the 3 pitot systems to stay in sync while providing bogus information.
Add to this the relatively low G capability of the airframe and low IAS limits, and I doubt the ability of an A330 to survive a severe case of Mach tuck. It was intended that the aircraft should never encounter this situation and its certification was directed at ensuring that it would not encounter Mach tuck.
Would the crew wait for Alt2 law?
TheShadow says:
I'm not really following why the Airbus Flt Ctrl pitch-up protection against an imminent Vmo/Mm0 encounter should kick in if the airspeeds being fed to the ADIRS were:
.
...a. Initially in agreement, albeit wrong due to pitot icing - either internally (supercooled ice-crystal build-up) or externally (BBC's pure water icing theory)
.
...b. Latterly being maintained at the selected cruise speed by autothrust (even though the actual airspeed/mach was much higher).
...
..c. Ultimately mismatching the three pitot-derived speeds sufficiently to cause a disagree and the Autopilot to disconnect.
.
I imagine that the flt ctrl protections are keyed by CAS and Mach, and if these weren't uniformly trending dangerously high (due to pitot blockage), what is there to cause the protections to cook off and intervene - by allowing the AP to pitch the nose up then disconnect? Isn't it more likely (per posts 1208 and 1471 and 1476 and 1489 ) that the aircraft accelerated into a nose-down pitch (i.e. mach tuck) because there was nothing (no high CAS or mach) detected to trigger any such protection. If the flight crew responded to a pitch-down by misinterpreting it as a stall and went TOGA/stick fwd, then that would have embedded the A330 in compressibility (with all its nasty L.o.C. follow-ons).
.
...a. Initially in agreement, albeit wrong due to pitot icing - either internally (supercooled ice-crystal build-up) or externally (BBC's pure water icing theory)
.
...b. Latterly being maintained at the selected cruise speed by autothrust (even though the actual airspeed/mach was much higher).
...
..c. Ultimately mismatching the three pitot-derived speeds sufficiently to cause a disagree and the Autopilot to disconnect.
.
I imagine that the flt ctrl protections are keyed by CAS and Mach, and if these weren't uniformly trending dangerously high (due to pitot blockage), what is there to cause the protections to cook off and intervene - by allowing the AP to pitch the nose up then disconnect? Isn't it more likely (per posts 1208 and 1471 and 1476 and 1489 ) that the aircraft accelerated into a nose-down pitch (i.e. mach tuck) because there was nothing (no high CAS or mach) detected to trigger any such protection. If the flight crew responded to a pitch-down by misinterpreting it as a stall and went TOGA/stick fwd, then that would have embedded the A330 in compressibility (with all its nasty L.o.C. follow-ons).
Now, I sense a common mis-perception about pitot blockages in your writing.
Yes, if you block the pitot inlet only, the indications will drop. But, if you block both the inlet and the tiny bleed holes drilled into the pitot tube to clear moisture from the tube, you end up with trapped air in the pitot system and that is a different ball of wax. Once you have trapped air behind the blockage, you can build pressure. Both kinds of blockages can and have happened.
Now lets look at the energy balance involved in getting AF447 from cruise speed down to the water in approximately 5 minutes in a configuration resembling a deep stall impact (not stated specifically by the BEA but can be inferred from the BEA's Line of Flight statement and the condition of recovered wreckage). How do you burn up that much energy that fast? One of my initial realizations about this accident was that I would have been hard pressed to bleed off that much energy in an F-4, and an A330 is a much cleaner aircraft. The only reasonable scenario it seems to me, is that the wing was operating at such an AOA that it was acting as a giant speed brake. Any time spent operating in a Mach tuck condition and then somehow recovering to end up in a deep stall, would eat up a lot of the total time available to burn up energy.
Vmo=330 knots, Mmo= .86, but the aircraft was demonstrated to higher speeds during its certification. (I believe it was demonstrated to M.93 but I don't have the reference at hand). The aircraft would not exhibit tuck below its demonstrated Mach number. It seems unlikely that the aircraft would accelerate above its demonstrated Mach number in level flight without application of a whole lot of power for a number of minutes that likely exceeds the ability of the 3 pitot systems to stay in sync while providing bogus information.
Add to this the relatively low G capability of the airframe and low IAS limits, and I doubt the ability of an A330 to survive a severe case of Mach tuck. It was intended that the aircraft should never encounter this situation and its certification was directed at ensuring that it would not encounter Mach tuck.
Last edited by Machinbird; 1st July 2010 at 03:07.

Joined: Sep 2000
Posts: 303
Likes: 0
From: England
A Pitch-up Scenario in some detail
Machinbird said:
Before you can even entertain the possibility of "a Vmo/Mmo pitchup scenario", you need to establish some premise supporting it. Otherwise it's just unfounded speculation (the worst kind). You say:
Could you amplify exactly what these two propositions entail in terms of indications? (i.e. static/non-varying? / low and decreasing? / fixed? etc). I realise that a pitot tube (i.e. Thales BA) will be affected differently to a pitot/colocated static tube - and acknowledge the relevance of the drain-hole. IMHO the slowly accumulating ingested granulated super-cooled ice crystals would not coalesce inside the tube, except at the heated edges, where there'd be a boundary layer of water that would flow and keep the drain-hole clear. In each pitot, tube-central air-flow pressure sensed at the transducer would be increasingly impeded - but never blocked entirely - leading to a growing decrement of the order of a few knots initially, and many knots latterly (after about 10 minutes say). You could liken the ice-crystal blocked pitot-tubes' characteristic to blowing through a tube filled with those tiny polystyrene beads used to fill bean-bags. The fact that the autothrust and autotrim were both subtly responding to this apparent speed loss would not be apparent to a crew in normal ennui (cruise lethargy mode). Why would a crew be in lethargy mode? Nothing says that weren't just cobble-stoning along in dense high-level Cirrus, having successfully picked a path through, between any active painting cells. Nil angst, el Kapitan in crew-rest, everything ostensibly hunky dory and nominal. Such reveries are normally only ever interrupted by cabin happenings, engine faults, electrical glitches or fuel transfer problems. Haywire flight control induced upsets aren't in the syllabus.
The BEA (says CONFITURE at post 1661) has conceded (pg 53) that the automation can be duped by false airspeeds to misposition flight control surfaces (although it's a bit unclear from the fractured Franglais in the quoted BEA text below):
It's obviously the auto-trimming to a false premise (i.e. incorrect airspeed) that the BEA is discussing quite obliquely there. But when you (Machinbird) talk about bleeding off 35,000ft worth of kinetic and potential energy in around 4.2 minutes, I'd agree that you need either very high speed/descent rate or a very high drag scenario/descent rate. Looking for continuity from my early Vmo/Mmo mach tuck scenario, I could amplify it thusly in a different direction. If you can't agree with an acceleration all the way into mach tuck, how about an acceleration to the point where the increasingly out-of-trim horizontal stabilizer (THS) finally exceeded the autopilot's force gradient holding ability to maintain FL350 (i.e. it just couldn't hold the increasingly deflected elevator loads beyond a certain point and declutched itself). Try to imagine what would've happened next.
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures. At the point where the autopilot disconnects, there'll be a quite significant instant pitchup (in comparison with the shock-wave induced pitchdown that's the expected outcome of hitting mach tuck). If the speed discrepancy at AP disconnect was (say) of the order of 30 knots indicated airspeed, then the "zoomability" factor is a function of around 55kts TAS. In this case any fair animation would have to show something like a 60 degree nose-up attitude within 10 seconds - before the very surprised pilot's input could be initiated and take effect. That's an instant unusual attitude of a low IAS at high power at around 43,000ft.... and one that's quite beyond any normal airline pilot's experience. In any further imaginings into what might have happened next, think night, IMC, cascading visual and aural alerts, well out of pitch-trim (but unaware of it), in ALT2 and with engines operating at high power at high AoA in very thin air. That's almost an automatic N over root T compressor stall. Losing a donk on one side is all you'd need for a quicker entry into autorotation. But what kind of autorotation? Is the crew ever going to wake up to the fact that the THS is trimmed way out of whack? Not likely - because the pitch-up and entry into a stable flat spin took only about a maximum of 60 seconds. So the spin entry is with a very nose-up trimmed THS. Is that engine-out scenario / airframe configuration supportive of a stable flat spin? You betcha. Descent rates? Exactly equal to the TU154 at Pulkovo. Flt612 entered an area of severe turbulence, pushing up the airplane from 36,000ft to 42,000ft within just 10 seconds. The angle of attack increased to 46 degrees and the airspeed dropped to zero. (in fact the crew actually tried to outclimb the storm clouds and stalled it).
So using the BEA admissions on the THS mis-set, it's possible to logically extrapolate the likely step-by-step, very dynamic deterioration of their situation. Besides a possible engine asymmetry, further factors mitigate against recovery:
.
...a. Any recovery would require the trim (THS) anomaly to be first detected then rectified.
...b. Centrifugal forces in the cockpit would be high and quite disorienting (and pax panic [back-rush aka movement aft], migrating drink carts etc in the cabin could change the CofG in a bad direction -aft). So too could any gear or flap extension.
...c. The one thing that sets a spin apart from other maneuvering within the average airline pilot's experience is that correct anti-spin recovery controls must be set and held for quite a lengthy period in order to overcome the couples dictating the roll, pitch and yaw. That's an alien task for an airline pilot, so he's unlikely to clear that hurdle.
At this point disagreement between PF/PNF in a survival situation will only tend to further complicate and detract from extricating themselves from the predicament.
The mode of separation of the vertical stabilizer, the injury patterns and the crew compartment deformation would tend to support a high rate descent impact in a stable flat spin (about 7500 ft/min). The engines (and other bottom seeking debris mass) shouldn't be too far from the LKP.
.
No guarantees that the Vmo/Mmo pitchup scenario was the cause, but if possible, it sure influences where to look for the aircraft and thus should be considered in the search plans.
Yes, if you block the pitot inlet only, the indications will drop. But, if you block both the inlet and the tiny bleed holes drilled into the pitot tube to clear moisture from the tube, you end up with trapped air in the pitot system and that is a different ball of wax. Once you have trapped air behind the blockage, you can build pressure. Both kinds of blockages can and have happened.
The BEA (says CONFITURE at post 1661) has conceded (pg 53) that the automation can be duped by false airspeeds to misposition flight control surfaces (although it's a bit unclear from the fractured Franglais in the quoted BEA text below):
The reappearance of the flight directors on the PFD when two air speeds will be calculated that can lead the crew to rapidly re-engage the autopilot. However, these speeds, though of the same order, can be erroneous and low and thus lead the autopilot to command movements of the flight control surfaces that are inappropriate for the real speed of the airplane.
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures. At the point where the autopilot disconnects, there'll be a quite significant instant pitchup (in comparison with the shock-wave induced pitchdown that's the expected outcome of hitting mach tuck). If the speed discrepancy at AP disconnect was (say) of the order of 30 knots indicated airspeed, then the "zoomability" factor is a function of around 55kts TAS. In this case any fair animation would have to show something like a 60 degree nose-up attitude within 10 seconds - before the very surprised pilot's input could be initiated and take effect. That's an instant unusual attitude of a low IAS at high power at around 43,000ft.... and one that's quite beyond any normal airline pilot's experience. In any further imaginings into what might have happened next, think night, IMC, cascading visual and aural alerts, well out of pitch-trim (but unaware of it), in ALT2 and with engines operating at high power at high AoA in very thin air. That's almost an automatic N over root T compressor stall. Losing a donk on one side is all you'd need for a quicker entry into autorotation. But what kind of autorotation? Is the crew ever going to wake up to the fact that the THS is trimmed way out of whack? Not likely - because the pitch-up and entry into a stable flat spin took only about a maximum of 60 seconds. So the spin entry is with a very nose-up trimmed THS. Is that engine-out scenario / airframe configuration supportive of a stable flat spin? You betcha. Descent rates? Exactly equal to the TU154 at Pulkovo. Flt612 entered an area of severe turbulence, pushing up the airplane from 36,000ft to 42,000ft within just 10 seconds. The angle of attack increased to 46 degrees and the airspeed dropped to zero. (in fact the crew actually tried to outclimb the storm clouds and stalled it).
from: tinyurl.com/27acnvn
Based on various information, including the partially decrypted chat logs from a recovered flight recorder, crash investigators believe that the aircraft climbed to an altitude higher than the maximum for which it was designed, causing the aircraft to enter into a flat spin from which it never recovered.[7]
Based on various information, including the partially decrypted chat logs from a recovered flight recorder, crash investigators believe that the aircraft climbed to an altitude higher than the maximum for which it was designed, causing the aircraft to enter into a flat spin from which it never recovered.[7]
.
...a. Any recovery would require the trim (THS) anomaly to be first detected then rectified.
...b. Centrifugal forces in the cockpit would be high and quite disorienting (and pax panic [back-rush aka movement aft], migrating drink carts etc in the cabin could change the CofG in a bad direction -aft). So too could any gear or flap extension.
...c. The one thing that sets a spin apart from other maneuvering within the average airline pilot's experience is that correct anti-spin recovery controls must be set and held for quite a lengthy period in order to overcome the couples dictating the roll, pitch and yaw. That's an alien task for an airline pilot, so he's unlikely to clear that hurdle.
At this point disagreement between PF/PNF in a survival situation will only tend to further complicate and detract from extricating themselves from the predicament.
The mode of separation of the vertical stabilizer, the injury patterns and the crew compartment deformation would tend to support a high rate descent impact in a stable flat spin (about 7500 ft/min). The engines (and other bottom seeking debris mass) shouldn't be too far from the LKP.
.
Joined: Jun 2009
Posts: 8
Likes: 0
From: 6m below sea-level
deep sea search
GreatBear
"Hopefully a Phase Four search effort will focus more on the area of the LKP, where the seabed has not yet been searched. Been a while since we have heard from the BEA, but I cannot believe they will discontinue the search efforts, leaving us all to worry about this Dragon."
excuse me, completely redundant to note the observation that the 15nmi innercircle around last reported position, apparently hasn't been thoroughly searched yet recently, or maybe there's an updated chart ?
to rule out that possibility is what counts too
"Hopefully a Phase Four search effort will focus more on the area of the LKP, where the seabed has not yet been searched. Been a while since we have heard from the BEA, but I cannot believe they will discontinue the search efforts, leaving us all to worry about this Dragon."
excuse me, completely redundant to note the observation that the 15nmi innercircle around last reported position, apparently hasn't been thoroughly searched yet recently, or maybe there's an updated chart ?
to rule out that possibility is what counts too
Joined: Jun 2009
Posts: 57
Likes: 0
From: Chesapeake Bay
Peter-1959:
There has been no news posted to the English language BEA web site since May 17, 2010.
Status of the search remains "The BEA is currently carrying out a review of the three undersea search phases that have been undertaken since the accident."
Many charts of the search area have been posted in this thread.
There seems to be a growing consensus among experienced contributors here who have carefully examined what is publicly known - ACARS messages, weather, communications, instrumentation, A330 structure and behavior - that the seabed immediately beneath the Last Known Position needs a closer look. This is an area that has not yet been searched (curiously a "donut hole," as one contributor has commented), so it would presumably become part of a Phase 4 effort if the BEA determines it worthwhile. Discovery and analysis of the hull and, better, the FDR and CVR are essential to unraveling the cause. More data is needed.
GB
There has been no news posted to the English language BEA web site since May 17, 2010.
Status of the search remains "The BEA is currently carrying out a review of the three undersea search phases that have been undertaken since the accident."
Many charts of the search area have been posted in this thread.
There seems to be a growing consensus among experienced contributors here who have carefully examined what is publicly known - ACARS messages, weather, communications, instrumentation, A330 structure and behavior - that the seabed immediately beneath the Last Known Position needs a closer look. This is an area that has not yet been searched (curiously a "donut hole," as one contributor has commented), so it would presumably become part of a Phase 4 effort if the BEA determines it worthwhile. Discovery and analysis of the hull and, better, the FDR and CVR are essential to unraveling the cause. More data is needed.
GB


Joined: Jun 2009
Posts: 57
Likes: 0
From: Chesapeake Bay
Hi SaturnV,
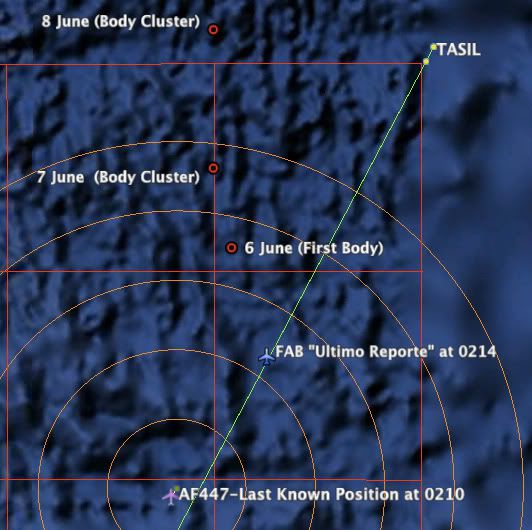
Could be just more seriously bad luck. I seem to remember a post long ago in the thread about the initial Brazilian "Ultimo Reporte" being based on a 02:14 estimated position; the actual Last Known Position was later determined (corrected) to be at the 02:10 coordinates... can't research that just now, but there is a lot of unsearched blue along the track in both your graphics, a few miles southward of "Ultimo Reporte." More of the "donut hole?"
Maybe mm43 can set us straight. He's been charting this for over a year.
GB
Could be just more seriously bad luck. I seem to remember a post long ago in the thread about the initial Brazilian "Ultimo Reporte" being based on a 02:14 estimated position; the actual Last Known Position was later determined (corrected) to be at the 02:10 coordinates... can't research that just now, but there is a lot of unsearched blue along the track in both your graphics, a few miles southward of "Ultimo Reporte." More of the "donut hole?"
Maybe mm43 can set us straight. He's been charting this for over a year.
GB
Joined: Jan 2005
Posts: 1,916
Likes: 0
From: W of 30W
TheShadow,
I don't see it as a question of "misposition" but more as an inapropriate amplitude of movement. Also, for the 330, the outboard ailerons could be displaced when actually only the inboard ailerons should move for higher speeds.
I don't think it is the way it works. The THS is not set in function of the indicated airspeed.
Anything below 60 seconds would be well enough ... IMO.
From the Airbus FCTM :
The BEA has conceded that the automation can be duped by false airspeeds to misposition flight control surfaces
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures.
In each pitot, tube-central air-flow pressure sensed at the transducer would be increasingly impeded - but never blocked entirely - leading to a growing decrement of the order of a few knots initially, and many knots latterly (after about 10 minutes say).
Could you amplify exactly what these two propositions entail in terms of indications?
Joined: Jun 2009
Posts: 1,330
Likes: 0
From: NNW of Antipodes
Originally posted by Machinbird ...
Yes, if you block the pitot inlet only, the indications will drop. But, if you block both the inlet and the tiny bleed holes drilled into the pitot tube to clear moisture from the tube, you end up with trapped air in the pitot system and that is a different ball of wax. Once you have trapped air behind the blockage, you can build pressure. Both kinds of blockages can and have happened.
Yes, if you block the pitot inlet only, the indications will drop. But, if you block both the inlet and the tiny bleed holes drilled into the pitot tube to clear moisture from the tube, you end up with trapped air in the pitot system and that is a different ball of wax. Once you have trapped air behind the blockage, you can build pressure. Both kinds of blockages can and have happened.
Simply put; in your proposal the the AP compensates for the apparently real increase in Pstag by calling on the A/THR to reduce engine power and commanding nose up to maintain FL350. This all happens unobtrusively (especially if you are monitoring the Fuel Management page), but when the apparently real Vmo M0.86 is exceeded, the AP decides its current configuration doesn't make sense and disconnects. Apart from the a/c being left in a perilous situation with CAS probably less than M0.70, the control mode then changes from Normal Law to Alternate Law.
The crux of my argument is that when changing from Normal to ALT Law, the RTLU is locked at the maximum allowable travel associated with the aircraft's current level and CAS, and the BEA reported -
1.12.3.5.5 Examination of the Rudder Travel Limiter Unit (RTLU)
The RTLU was found in its place in the fin and disassembled. An examination was performed at the manufacturer�s and showed that it would allow travel of the rudder measured as 7.9� +/- 0.1�. As an example, at FL350, this travel is obtained for Mach 0.8 +/- 0.004, corresponding to a CAS of 272 +/- 2 kt.
The RTLU was found in its place in the fin and disassembled. An examination was performed at the manufacturer�s and showed that it would allow travel of the rudder measured as 7.9� +/- 0.1�. As an example, at FL350, this travel is obtained for Mach 0.8 +/- 0.004, corresponding to a CAS of 272 +/- 2 kt.

Obviously if we knew that M0.82 was the set CRZ speed, then the RTLU max angle could actually be showing the prelude to the pitot disagreement, i.e. pitot blockage was occurring and an overspeed event was in the making. If the speed had been set at M0.80, then whatever happened at AP disconnect would seem not to be related.
The ACARS F/CTL RUD TRV LIM FAULT was sent after the pilot induced warnings, i.e. when they went looking for the AoA "bird" page. There is a vacant 9 sec slot between those warnings, and they are then followed by the RTLU fault, which could be as a result of a rudder pedal being depressed and held - a possible indication of a stall/spin?
mm43
Last edited by mm43; 5th July 2010 at 01:28. Reason: updated graphic title
Joined: Jun 2009
Posts: 1,330
Likes: 0
From: NNW of Antipodes
Recently GreatBear produced a graphic showing amongst others, the areas searched using Towed Pinger Locators (TPL) of the US Navy and deployed from the Anchor Handling Tugs (AHT) "Fairmount Expedition" and "Fairmont Glacier" and also the areas searched by the Nuclear Attack Submarine (SNA) "Emeraude" using her inbuilt sonar detection equipment housed in the Sonar Dome. At the time, there were no signals detected by either means, but midway through the recent extended Phase 3 Search by the "Seabed Worker" using REMUS Autonomus Underwater Vehicles (AUV) equipped with sidescan sonar (SSS), the French Ministry of Defence reported that Thales (makers of the missing aircraft's pitot tubes) had reanalyised the "Emeraude" data and were of the opinion that pinger chirps had been recorded when the sub visited an area about 40NM WSW of the Last Known Position (LKP).
The "Seabed Worker" was diverted from her predetermined search area and the aforementioned area was searched - to no avail. There appeared to be some infighting between the MoD and the BEA, but back here in this thread Hyperveloce and others postulated that there could have been ducted ULB signals recorded that arrived by reflecting off sheer faces or bowl like geophysical structures and on being refracted when passing through a salinity inversion layer became trapped. For ease of locating, I have named that bathymetric feature L'Emeraude Range in the following graphic.

Also shown in the graphic is the initial aerial grid search box that the Brazilian Air Force (FAB) made on 01 June 2009 from 10NM before the LKP and to 10NM either side of the track to TASIL. On 02 June 2009 the FAB made further aerial searches in the box to the east of the LKP to TASIL track and likewise in a similar box to the north of that shown. The area bordered in white has not been surveyed using SSS, while nearly all of that area to the west of the SW corner of the aerial search box was initially searched by the "Emeraude" using her sonar detectors.
SaturnV has also posted graphics showing areas searched by the Brazilian Air Force and Navy along with French Naval assistance.
I'll leave you to draw your own conclusions as to where the a/c crashed, but bear in mind that the first body was found a little east of north and about 40NM from the LKP on 6 June - 5.5 days after the crash, and any areas not searched west of the LKP could be likely candidates.
mm43
The "Seabed Worker" was diverted from her predetermined search area and the aforementioned area was searched - to no avail. There appeared to be some infighting between the MoD and the BEA, but back here in this thread Hyperveloce and others postulated that there could have been ducted ULB signals recorded that arrived by reflecting off sheer faces or bowl like geophysical structures and on being refracted when passing through a salinity inversion layer became trapped. For ease of locating, I have named that bathymetric feature L'Emeraude Range in the following graphic.
Also shown in the graphic is the initial aerial grid search box that the Brazilian Air Force (FAB) made on 01 June 2009 from 10NM before the LKP and to 10NM either side of the track to TASIL. On 02 June 2009 the FAB made further aerial searches in the box to the east of the LKP to TASIL track and likewise in a similar box to the north of that shown. The area bordered in white has not been surveyed using SSS, while nearly all of that area to the west of the SW corner of the aerial search box was initially searched by the "Emeraude" using her sonar detectors.
SaturnV has also posted graphics showing areas searched by the Brazilian Air Force and Navy along with French Naval assistance.
I'll leave you to draw your own conclusions as to where the a/c crashed, but bear in mind that the first body was found a little east of north and about 40NM from the LKP on 6 June - 5.5 days after the crash, and any areas not searched west of the LKP could be likely candidates.
mm43
Last edited by mm43; 5th July 2010 at 01:55. Reason: updated graphic
Joined: Jun 2009
Posts: 57
Likes: 0
From: Chesapeake Bay
mm43
I reviewed the Brazilian Air Force's notes on their aerial search for AF447. It seems that in Note 3 on 1 June, 2009 the FAB estimated a last position based on time of receipt of the final ACARS message at 0214:
That estimation put the FAB's Ultimo Reporte coordinates more than 20nm NE of the 0210 ACARS position report (Last Known Position or LKP) where/when the sudden cascade of 0210 ACARS WRN and FLT messages began.
From that point, as described later in the FAB's Note 16 on 6 June, they organized the aerial searches northeastward:
In your recent chart (Post #1670), the area labeled "Initial aerial grid search 01 June 2009" begins at the LKP, not at the Ultimo Reporte location used by the FAB and referenced in their Note 16. Their search seems to have proceeded "noroeste" from the Ultimo Reporte location, not from the LKP.
I've been unable to track down precise lat/long info for the Brazilian search grids. Perhaps you have acquired that information since your June 6 post last year and have correctly located the "Initial aerial grid search 01 June 2009" area on your chart.
But if not, it seems the search area shown should be moved to the northeast some 20+nm along the track and maybe an uncertainty notation added to avoid confusion... If not, the "donut hole" in the FAB and BEA search patterns becomes larger.
GB
I reviewed the Brazilian Air Force's notes on their aerial search for AF447. It seems that in Note 3 on 1 June, 2009 the FAB estimated a last position based on time of receipt of the final ACARS message at 0214:
No padr�o de busca utilizado, as aeronaves da FAB percorrem a rota do voo AFR 447, a partir da posi��o de reporte da falha t�cnica (03� 16`28� N/ 030� 22`28� W).
From that point, as described later in the FAB's Note 16 on 6 June, they organized the aerial searches northeastward:
05h00-06h30 - A aeronave sobrevoa a �rea de busca e identifica uma s�rie de pontos numa regi�o a 69,5 quil�metros a noroeste do local onde o voo AF 447 fez, �s 23h14 de 31 de maio, o �ltimo o reporte relatando uma pane el�trica no AIR BUS A- 330.
I've been unable to track down precise lat/long info for the Brazilian search grids. Perhaps you have acquired that information since your June 6 post last year and have correctly located the "Initial aerial grid search 01 June 2009" area on your chart.
But if not, it seems the search area shown should be moved to the northeast some 20+nm along the track and maybe an uncertainty notation added to avoid confusion... If not, the "donut hole" in the FAB and BEA search patterns becomes larger.
GB
Joined: Sep 2000
Posts: 303
Likes: 0
From: England
The high-rate Pitch-up and THS Mis-set
Confiture said: (quoting theShadow)
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures.
.
Confiture,
1. Are you able to expand upon this and supply/propose what the alternative input factors might be that normally cause the Trimmable Horizontal Stabilizer (THS) to auto-trim?
.
2. Are you placing a different interpretation upon the BEA statement (which is admittedly a mite obscure)?
.
3. Do you not subscribe to the theory that the autopilot could have kicked out due to holding a limiting force gradient in the pitching plane? (and therefore that the surprise factor that may have made all the difference to any subsequent loss of control could have been a sudden high-rate pitch-up)
.
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures.
I don't think it is the way it works. The THS is not set in function of the indicated airspeed.
Confiture,
1. Are you able to expand upon this and supply/propose what the alternative input factors might be that normally cause the Trimmable Horizontal Stabilizer (THS) to auto-trim?
.
2. Are you placing a different interpretation upon the BEA statement (which is admittedly a mite obscure)?
.
3. Do you not subscribe to the theory that the autopilot could have kicked out due to holding a limiting force gradient in the pitching plane? (and therefore that the surprise factor that may have made all the difference to any subsequent loss of control could have been a sudden high-rate pitch-up)
.
Joined: Jun 2009
Posts: 1,330
Likes: 0
From: NNW of Antipodes
Originally posted by GreatBear ..
In your recent chart (Post #1670), the area labeled "Initial aerial grid search 01 June 2009" begins at the LKP, not at the Ultimo Reporte location used by the FAB and referenced in their Note 16. Their search seems to have proceeded "noroeste" from the Ultimo Reporte location, not from the LKP.
In your recent chart (Post #1670), the area labeled "Initial aerial grid search 01 June 2009" begins at the LKP, not at the Ultimo Reporte location used by the FAB and referenced in their Note 16. Their search seems to have proceeded "noroeste" from the Ultimo Reporte location, not from the LKP.

The areas searched from 03 June 2009 were those to the south, and were a result of some miscellaneous debris and an oil slick being found. In other words the FAB headed off on a tangent and it wasn't until surface vessels arrived that the southern site could be excluded.
mm43
Joined: Mar 2001
Posts: 694
Likes: 0
From: us
Belgique,
The ASJ is not published by a dis-interested party. For example, the Nolan-Law Group, publisher of the ASJ, in Chicago is presently suing Parker-Hannifin, asserting that its equipment was responsible for the crash of EgyptAir 990. They are also suing Air France for AF 358 for the weather-related over-run at Toronto.
The ASJ is not published by a dis-interested party. For example, the Nolan-Law Group, publisher of the ASJ, in Chicago is presently suing Parker-Hannifin, asserting that its equipment was responsible for the crash of EgyptAir 990. They are also suing Air France for AF 358 for the weather-related over-run at Toronto.
Joined: Jan 2005
Posts: 1,916
Likes: 0
From: W of 30W
TheShadow,
- The pilot, or the AP, set the trim in order to relieve the effort on the flight control command once the desirable attitude is established. That effort is related to the real airspeed, not the indicated one.
I imagine the hydraulic jacks have the capacity to measure the effort applied on them the same way the pilot would feel it through his arm (?)
- I don't see it as a question of "misposition" but more as an inappropriate amplitude of movement (the Rudder Travel Limiter Unit would be duped by a false indicated airspeed - See the graph posted by mm43 earlier)
Also, for the 330, the outboard ailerons could be displaced when actually only the inboard ailerons should move for higher speeds.
- I personally don't subscribe to such theory, but it doesn't mean I'm correct, I could learn something I'm not yet aware of.
Joined: Jun 2009
Posts: 8
Likes: 0
From: 6m below sea-level
deep sea searches
auv-ee
"so for 300-500m side scan range the altitude should be 30-50m."
Exactly!
so I am wondering if the remaining resolution is still appropriate enough to be able to detect the aircraft parts, in other words to find a trace, while the towed sidescan sonar, and the preprogrammed auv are in fact not descending into the deeper valleys, assuming analysis based upon existing bathymetric data alone will provide the result for those area's depicted in light blue on the latest charts in this thread ?
Or maybe something is wrong with my assumption ?
With all respect to all the effort put into this extremely difficult task over a wide area.
"so for 300-500m side scan range the altitude should be 30-50m."
Exactly!
so I am wondering if the remaining resolution is still appropriate enough to be able to detect the aircraft parts, in other words to find a trace, while the towed sidescan sonar, and the preprogrammed auv are in fact not descending into the deeper valleys, assuming analysis based upon existing bathymetric data alone will provide the result for those area's depicted in light blue on the latest charts in this thread ?
Or maybe something is wrong with my assumption ?
With all respect to all the effort put into this extremely difficult task over a wide area.
Joined: May 2010
Posts: 126
Likes: 0
From: MA, USA
Originally Posted by Peter-1959
... in other words to find a trace, while the towed sidescan sonar, and the preprogrammed auv are in fact not descending into the deeper valleys, assuming analysis based upon existing bathymetric data alone will provide the result for those area's depicted in light blue on the latest charts in this thread ?
Or maybe something is wrong with my assumption ?
Or maybe something is wrong with my assumption ?
The towed sonar provides real-time sidescan data to the operator. The sidescan provides an excellent measure of altitude in the form of the time-to-the-first-echo. The operator uses this information, or separate altimeter information, to adjust the tow-body height by paying cable in or out (or even by changing ship speed in extreme cases).
The AUV measures altitude acoustically, and for this type of mission would be programmed to fly in constant altitude mode. The only places where the altitude will be significantly in error are where the slope of the bottom exceeds the AUV's climb/descent capability. Route planning that follows the ridge lines, rather than crossing them, minimizes, but does not eliminate these places. The direction of the tracklines is the only part of the AUV programing (or towed sonar planning) that is based on previous measurements of bathymetry.
With the debris assumed to be spread over a few hundred meters, any "holiday" in the data, from either the tethered or untethered sonars, that is smaller than 100m long and wide is unlikely to contain the a/c. Larger holidays can be searched again along a different track.

Joined: Mar 2003
Aviation Qualifications: ATPL
Posts: 2,558
Likes: 155
From: BC
In order to offer a contribution, I would like to first contextualize and otherwise summarize/recapture the dialogue between machinebird, TheShadow and CONF iture regarding the notion that the THS responded to a failing speed and therefore trimmed nose-up while the elevators became increasingly nose-down, keeping the airplane from departing the baro-altitude until the autoflight system "could no longer hold on" and "de-clutched".
I do not believe this scenario is plausible, (though anything may be possible).
First, a summary of the quotes I find relevant to the discussion, with a caveat that if I has mis-captured, misunderstood or otherwise missed an important point by the author(s) in these quotes which has taken my understanding off in the "wrong" direction, that I wish correction, and we can take it from there. Also, for others such as PBL or HN39 who may be reading this and who are qualified for more than I in such discussions, I welcome clarifications/comments. This is a sense of the theory I have from the available information, and not a refutation of the theory per se.
CONF iture;
I don't subscribe to the theory either. So readers will understand where I am coming from, I will re-state up front that I am not an engineer or a mathematician or an AME. My speciality is flight safety work, specifically flight data analysis (A320, B777) and I have flown the A340/A330/A320 series aircraft since 1992.
Here is why I don't think the theory is plausible:
First, the scenario described is reminiscient of much earlier aircraft like the B727. Sometimes the B727 would be slightly out of trim to the point where we would actually roll the trim-wheel forward (ND) about a half-turn or so to avoid the inevitible "bump" when disconnecting the a/p to start the descent. I think this is relevant because aircraft flight control systems have clearly changed vastly since then.
Being FBW, the A330 flight control system is therefore much more sophisticated. From a bit of research in the AMM and other documents including the paper below, I think this is a much more sophisticated system which would not behave as has been suggested.
There is at least one ECAM Abnormal which will occur if there is a difference, or rather a disagreement between the FMS CG/THS calculated trim position, and the actual THS trim position, "F/CTL PITCH TRIM/MCDU/CG DISAGREE).
Also, in the, F/CTL STAB CTL FAULT ECAM message, the second dot-point states that "IF trim is locked above 8deg NU, pitch down authority may be insufficent for speed above 180 kts". 180kts is a long way from the cruise speed of 272kts, (approximately); any degradation of control as a result of a degrading CAS and a THS trimming NU would have been gradually apparent through an increasing tendency of the aircraft to pitch up and, as the limits outlined in this ECAM Abnormal were approached, may perhaps begin climbing before either the autopilot disconnected, or the authority of the elevator to hold the altitude, was lost.
In other words, the aircraft would likely not "break away", but would gently (assuming smooth air!) begin climbing away in spite of the attempt by the flight controls to maintain altitude, when the limits of controllability, (maintaining the altitude against increased THS NU and limited elevator authority) were reached.
The following is from the A340 AMM, (I have no reason to believe it would be materially different than the A330 system). The A330 pitch control system description discusses a number of factors and input data which have not been taken into account in the previous posts.
Briefly, the AMM states:
There is nothing in this section of the AMM which indicates that the Nz law and specified responses will not function in Alternate law.
Second, I began looking for research concerning flight control laws, (initially trying to find out what "Nz" meant!), and found, among many papers and books, the following which seemed to fit the bill in terms of describing the nature, depth and intent of electronic flight control system design; the focus of this (and many papers) was "flight control clearance", which, contrary to perhaps an intuited notion, has to do with "clearing" flight control law design with the appropriate authorities. The process is, I find, extremely complex, requiring much in-depth, expensive and thorough testing in many flight regimes. The reasons are clear and obvious - one cannot "see" electrons as one can see cables and pulleys! That aside, the point being made here is, the posited scenario is well within the realm of experience, (which is the reason I provided the example of the B727 'bump' upon disconnection), and not something that is an outlying matter or even a QF72-type issue. I'm not saying it's not possible - QF72 showed us that it is possible for FCPCs and FCSCs to misbehave, but that is not what is being claimed here.
For these two reasons, I don't think the suggestion is plausible within what may reasonably be known about the EFCS that the THS was somehow responding to a degrading, false airspeed and trimming nose-up, until either the autoflight system or the autopilot "declutched" and the aircraft zoomed upwards.
I welcome informed disagreement. Here is the paper:
I think that the speed with which these events occurred precludes such a scenario. I do not think that the airplane suddenly pitched up, nor, for different reasons, do I agree with the "mach tuck" suggestion, (mainly because, the water entry was at low forward speed - unless I've missed something in the theory, we've been over this many times)
PJ2
I do not believe this scenario is plausible, (though anything may be possible).
First, a summary of the quotes I find relevant to the discussion, with a caveat that if I has mis-captured, misunderstood or otherwise missed an important point by the author(s) in these quotes which has taken my understanding off in the "wrong" direction, that I wish correction, and we can take it from there. Also, for others such as PBL or HN39 who may be reading this and who are qualified for more than I in such discussions, I welcome clarifications/comments. This is a sense of the theory I have from the available information, and not a refutation of the theory per se.
Originally Posted by TheShadow 1st July 2010, 11:15 #1663 in response to machinebird
It's obviously the auto-trimming to a false premise (i.e. incorrect airspeed) that the BEA is discussing quite obliquely there. But when you (Machinbird) talk about bleeding off 35,000ft worth of kinetic and potential energy in around 4.2 minutes, I'd agree that you need either very high speed/descent rate or a very high drag scenario/descent rate. Looking for continuity from my early Vmo/Mmo mach tuck scenario, I could amplify it thusly in a different direction. If you can't agree with an acceleration all the way into mach tuck, how about an acceleration to the point where the increasingly out-of-trim horizontal stabilizer (THS) finally exceeded the autopilot's force gradient holding ability to maintain FL350 (i.e. it just couldn't hold the increasingly deflected elevator loads beyond a certain point and declutched itself). Try to imagine what would've happened next.
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures. At the point where the autopilot disconnects, there'll be a quite significant instant pitchup . . .
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures. At the point where the autopilot disconnects, there'll be a quite significant instant pitchup . . .
Originally Posted by Confiture 2nd July 2010, 12:00 #1668
TheShadow,
I don't see it as a question of "misposition" but more as an inapropriate amplitude of movement. Also, for the 330, the outboard ailerons could be displaced when actually only the inboard ailerons should move for higher speeds.
I don't think it is the way it works. The THS is not set in function of the indicated airspeed.
Originally Posted by TheShadow
The BEA has conceded that the automation can be duped by false airspeeds to misposition flight control surfaces
Originally Posted by TheShadow
The THS is trimmed for a lower speed and so the baro-hold is causing the autopilot (at the higher actual airspeed) to hold stick forward/elevator down pressures.
Originally Posted by TheShadow 4th July 2010, 02:20 #1672 in response to Confiture
,
1. Are you able to expand upon this and supply/propose what the alternative input factors might be that normally cause the Trimmable Horizontal Stabilizer (THS) to auto-trim?
.
2. Are you placing a different interpretation upon the BEA statement (which is admittedly a mite obscure)?
.
3. Do you not subscribe to the theory that the autopilot could have kicked out due to holding a limiting force gradient in the pitching plane? (and therefore that the surprise factor that may have made all the difference to any subsequent loss of control could have been a sudden high-rate pitch-up)
1. Are you able to expand upon this and supply/propose what the alternative input factors might be that normally cause the Trimmable Horizontal Stabilizer (THS) to auto-trim?
.
2. Are you placing a different interpretation upon the BEA statement (which is admittedly a mite obscure)?
.
3. Do you not subscribe to the theory that the autopilot could have kicked out due to holding a limiting force gradient in the pitching plane? (and therefore that the surprise factor that may have made all the difference to any subsequent loss of control could have been a sudden high-rate pitch-up)
Originally Posted by Confiture Today, 07:37 #1676 in response to TheShadow
1.The pilot, or the AP, set the trim in order to relieve the effort on the flight control command once the desirable attitude is established. That effort is related to the real airspeed, not the indicated one.
I imagine the hydraulic jacks have the capacity to measure the effort applied on them the same way the pilot would feel it through his arm (?)
2.I don't see it as a question of "misposition" but more as an inappropriate amplitude of movement (the Rudder Travel Limiter Unit would be duped by a false indicated airspeed - See the graph posted by mm43 earlier)
Also, for the 330, the outboard ailerons could be displaced when actually only the inboard ailerons should move for higher speeds.
3.I personally don't subscribe to such theory, but it doesn't mean I'm correct, I could learn something I'm not yet aware of.
I imagine the hydraulic jacks have the capacity to measure the effort applied on them the same way the pilot would feel it through his arm (?)
2.I don't see it as a question of "misposition" but more as an inappropriate amplitude of movement (the Rudder Travel Limiter Unit would be duped by a false indicated airspeed - See the graph posted by mm43 earlier)
Also, for the 330, the outboard ailerons could be displaced when actually only the inboard ailerons should move for higher speeds.
3.I personally don't subscribe to such theory, but it doesn't mean I'm correct, I could learn something I'm not yet aware of.
I don't subscribe to the theory either. So readers will understand where I am coming from, I will re-state up front that I am not an engineer or a mathematician or an AME. My speciality is flight safety work, specifically flight data analysis (A320, B777) and I have flown the A340/A330/A320 series aircraft since 1992.
Here is why I don't think the theory is plausible:
First, the scenario described is reminiscient of much earlier aircraft like the B727. Sometimes the B727 would be slightly out of trim to the point where we would actually roll the trim-wheel forward (ND) about a half-turn or so to avoid the inevitible "bump" when disconnecting the a/p to start the descent. I think this is relevant because aircraft flight control systems have clearly changed vastly since then.
Being FBW, the A330 flight control system is therefore much more sophisticated. From a bit of research in the AMM and other documents including the paper below, I think this is a much more sophisticated system which would not behave as has been suggested.
There is at least one ECAM Abnormal which will occur if there is a difference, or rather a disagreement between the FMS CG/THS calculated trim position, and the actual THS trim position, "F/CTL PITCH TRIM/MCDU/CG DISAGREE).
Also, in the, F/CTL STAB CTL FAULT ECAM message, the second dot-point states that "IF trim is locked above 8deg NU, pitch down authority may be insufficent for speed above 180 kts". 180kts is a long way from the cruise speed of 272kts, (approximately); any degradation of control as a result of a degrading CAS and a THS trimming NU would have been gradually apparent through an increasing tendency of the aircraft to pitch up and, as the limits outlined in this ECAM Abnormal were approached, may perhaps begin climbing before either the autopilot disconnected, or the authority of the elevator to hold the altitude, was lost.
In other words, the aircraft would likely not "break away", but would gently (assuming smooth air!) begin climbing away in spite of the attempt by the flight controls to maintain altitude, when the limits of controllability, (maintaining the altitude against increased THS NU and limited elevator authority) were reached.
The following is from the A340 AMM, (I have no reason to believe it would be materially different than the A330 system). The A330 pitch control system description discusses a number of factors and input data which have not been taken into account in the previous posts.
Briefly, the AMM states:
"Electrical Flight Control System (EFCS)
Pitch
The aircraft pitch control is achieved from the side sticks and in certain cases, from the pitch trim control wheels, which act on the elevators and on the THS, depending on the different laws.
1. Nz Law (Nz is 'normal' acceleration, Ny is lateral acceleration)
This law, elaborated in the FCPCs, (Flight Control Primary Computers), is the normal pitch law engaged in the flight phase."
Through a pitch action on the side stick, the pilot commands a load factor; the Nz law achieves this command, depending on the aircraft feedbacks, so that:
- The short-term orders are achieved by the elevator servo controls.
- The long-term orders are achieved by the THS actuator (Autotrim function).
The gains depend on the Vc, on the flap and slat position and on the CG location.
In addition, the Nz law permits to achieve:
- A load factor limiation, depending on the flap and slat position.
- A bank angle compensation, for bank angles lower than 33deg.
- A deflection limitation of the THS in the nose-up direcion in the event of the activation of the high angle-of-attack protection, the excessive load factor and the excessive bank angle exceeding.
The Nz law is such that the aircraft response is quasi-independent of the aircraft speed, weight, and CG location.If both ADIRUs are failed, the Nz law is kept, but with limited pitch rate and gains. A consolidation of the vertical acceleration and pitch attitude rate is then performed via the two accelerometer units."
Pitch
The aircraft pitch control is achieved from the side sticks and in certain cases, from the pitch trim control wheels, which act on the elevators and on the THS, depending on the different laws.
1. Nz Law (Nz is 'normal' acceleration, Ny is lateral acceleration)
This law, elaborated in the FCPCs, (Flight Control Primary Computers), is the normal pitch law engaged in the flight phase."
Through a pitch action on the side stick, the pilot commands a load factor; the Nz law achieves this command, depending on the aircraft feedbacks, so that:
- The short-term orders are achieved by the elevator servo controls.
- The long-term orders are achieved by the THS actuator (Autotrim function).
The gains depend on the Vc, on the flap and slat position and on the CG location.
In addition, the Nz law permits to achieve:
- A load factor limiation, depending on the flap and slat position.
- A bank angle compensation, for bank angles lower than 33deg.
- A deflection limitation of the THS in the nose-up direcion in the event of the activation of the high angle-of-attack protection, the excessive load factor and the excessive bank angle exceeding.
The Nz law is such that the aircraft response is quasi-independent of the aircraft speed, weight, and CG location.If both ADIRUs are failed, the Nz law is kept, but with limited pitch rate and gains. A consolidation of the vertical acceleration and pitch attitude rate is then performed via the two accelerometer units."
Second, I began looking for research concerning flight control laws, (initially trying to find out what "Nz" meant!), and found, among many papers and books, the following which seemed to fit the bill in terms of describing the nature, depth and intent of electronic flight control system design; the focus of this (and many papers) was "flight control clearance", which, contrary to perhaps an intuited notion, has to do with "clearing" flight control law design with the appropriate authorities. The process is, I find, extremely complex, requiring much in-depth, expensive and thorough testing in many flight regimes. The reasons are clear and obvious - one cannot "see" electrons as one can see cables and pulleys! That aside, the point being made here is, the posited scenario is well within the realm of experience, (which is the reason I provided the example of the B727 'bump' upon disconnection), and not something that is an outlying matter or even a QF72-type issue. I'm not saying it's not possible - QF72 showed us that it is possible for FCPCs and FCSCs to misbehave, but that is not what is being claimed here.
For these two reasons, I don't think the suggestion is plausible within what may reasonably be known about the EFCS that the THS was somehow responding to a degrading, false airspeed and trimming nose-up, until either the autoflight system or the autopilot "declutched" and the aircraft zoomed upwards.
I welcome informed disagreement. Here is the paper:
Link to this paper
Nationaal Lucht- en Ruimtevaartlaboratorium
National Aerospace Laboratory NLR
NLR-TP-2004-147
New Analysis Techniques for Clearance of Flight Control Laws
An overview of GARTEUR Flight Mechanics Action Group 11
M. Selier, C. Fielding (BAE Systems), U. Korte (EADS), R. Luckner (Airbus)
The design process for modern FCS is a complex, multi-disciplinary activity, which has to be transparent, correct and well documented, in order to allow certification of the aircraft. The design and validation of the flight control laws (FCLs) is an important part of the FCS design and certification, as the safety of aircraft operations is primarily dependent on them. The FCL development process has a highly iterative nature of design and analysis activities. Basically, five phases can be identified:
1. Off-line phase, using desktop design, analysis and simulation,
2. Pilot-in-the-loop tests, using manned, real-time simulation,
3. Iron-bird tests, with hardware in the loop,
4. Formal Clearance of the control laws,
5. Flight tests.
This paper focuses on the formal clearance in the fourth phase where prior to flight tests, it must be proven to the clearance authorities that the flight controller is functioning correctly.
Exhaustive analysis results from phases 1 until 3 are used to demonstrate that all certification criteria are fulfilled. As the costs of analysis runs increase exponentially each phase. Improved identification of the weak spots of the controller and worst case parameter combinations in phase 1, can lead to less required analysis in phases 2 and 3, thereby reducing the overall costs of the clearance process. Also, the chance of missing worst cases can be reduced by more effective analysis in phase 1.
Typically, for the purpose of clearance, criteria are employed that cover both linear and nonlinear stability, as well as various handling and performance requirements. For each point of the flight envelope, for all possible configurations and for all combinations of parameter variations and uncertainties1, all violations of clearance criteria and the worst-case result for each criterion, have to be found. Based on these clearance results, flight restrictions may be necessary.
The number of cases that have to be checked is huge, especially for fighter aircraft. Many different store configurations have to be investigated, involving large variations of mass, moments of inertia and centre of gravity location. It must also be proven that the controller can cope with error tolerances on air data signals that are used for control law scheduling. The aerodynamic data that is used in the mathematical models for design and analysis can only be determined within given bounds. These uncertainty bounds have to be taken into account in the clearance. The models usually use linear approximations for nonlinear effects that are not fully known, or for nonlinearities that would make the model unacceptably complex. Since flying the aircraft in the presence of failures might involve the use of alternative control laws (e.g., by switching to a backup control law after the loss of a certain sensor or a control surface failure), the additional cases that have to be investigated can be significant.
(The rest of the paper may be found at http://www.nlr.nl/smartsite.dws?id=2821)
Nationaal Lucht- en Ruimtevaartlaboratorium
National Aerospace Laboratory NLR
NLR-TP-2004-147
New Analysis Techniques for Clearance of Flight Control Laws
An overview of GARTEUR Flight Mechanics Action Group 11
M. Selier, C. Fielding (BAE Systems), U. Korte (EADS), R. Luckner (Airbus)
The design process for modern FCS is a complex, multi-disciplinary activity, which has to be transparent, correct and well documented, in order to allow certification of the aircraft. The design and validation of the flight control laws (FCLs) is an important part of the FCS design and certification, as the safety of aircraft operations is primarily dependent on them. The FCL development process has a highly iterative nature of design and analysis activities. Basically, five phases can be identified:
1. Off-line phase, using desktop design, analysis and simulation,
2. Pilot-in-the-loop tests, using manned, real-time simulation,
3. Iron-bird tests, with hardware in the loop,
4. Formal Clearance of the control laws,
5. Flight tests.
This paper focuses on the formal clearance in the fourth phase where prior to flight tests, it must be proven to the clearance authorities that the flight controller is functioning correctly.
Exhaustive analysis results from phases 1 until 3 are used to demonstrate that all certification criteria are fulfilled. As the costs of analysis runs increase exponentially each phase. Improved identification of the weak spots of the controller and worst case parameter combinations in phase 1, can lead to less required analysis in phases 2 and 3, thereby reducing the overall costs of the clearance process. Also, the chance of missing worst cases can be reduced by more effective analysis in phase 1.
Typically, for the purpose of clearance, criteria are employed that cover both linear and nonlinear stability, as well as various handling and performance requirements. For each point of the flight envelope, for all possible configurations and for all combinations of parameter variations and uncertainties1, all violations of clearance criteria and the worst-case result for each criterion, have to be found. Based on these clearance results, flight restrictions may be necessary.
The number of cases that have to be checked is huge, especially for fighter aircraft. Many different store configurations have to be investigated, involving large variations of mass, moments of inertia and centre of gravity location. It must also be proven that the controller can cope with error tolerances on air data signals that are used for control law scheduling. The aerodynamic data that is used in the mathematical models for design and analysis can only be determined within given bounds. These uncertainty bounds have to be taken into account in the clearance. The models usually use linear approximations for nonlinear effects that are not fully known, or for nonlinearities that would make the model unacceptably complex. Since flying the aircraft in the presence of failures might involve the use of alternative control laws (e.g., by switching to a backup control law after the loss of a certain sensor or a control surface failure), the additional cases that have to be investigated can be significant.
(The rest of the paper may be found at http://www.nlr.nl/smartsite.dws?id=2821)
PJ2
Last edited by PJ2; 4th July 2010 at 22:13. Reason: To add comments regarding a THS/CG Disagree ECAM message; syntax.