I'm currently studying an MSc in avionic system design at Cranfield, with a focus on cockpit / flight deck design.
Since our aim is to simplify the job of flying as much as possible on such an odd beast, our focus will be on automating many things such as the transition from hover to forward flight and back again (a lot of algorithm writing ahead!)
Which is you are trying to do? Sorting out a cockpit and designing flight control systems are two VERY different objectives.
I don�t know who has told you that controlling the transition on a vectored thrust aircraft is difficult, but I can assure you it is not. In visual conditions you do not even need to refer to an instrument in either the accel or decel case. In cloud you need to keep your wings level and your pitch attitude roughly flat with reference to the attitude display to prevent any risk of the wing stalling angle being reached. (This attitude control is what you do by simple visual references when these are available). That just leaves height control.
For HEIGHT control the accel and decel need two different techniques:
Accel - from a VTO leave the power set as needed for a gentle climb or from a steady hover increase the power to give a slight positive climb. Then leave the power as set and push the nozzle lever forward (or use the nacelle pod angle trim switch to reduce the pod angle) until you reach full travel on the control by which time you HAVE to be flying on your wings.
All that is left to discuss is the RATE at which you rotate the thrust vector. That is SO simple it hardly needs describing � move the nozzle lever too fast and you will sink, move it too slowly and you climb unnecessarily high. So during the accel your nozzle lever rate of movement is your height control. Visually this is obviously a piece of cake while in cloud it behoves you to keep an eye on the VSI.
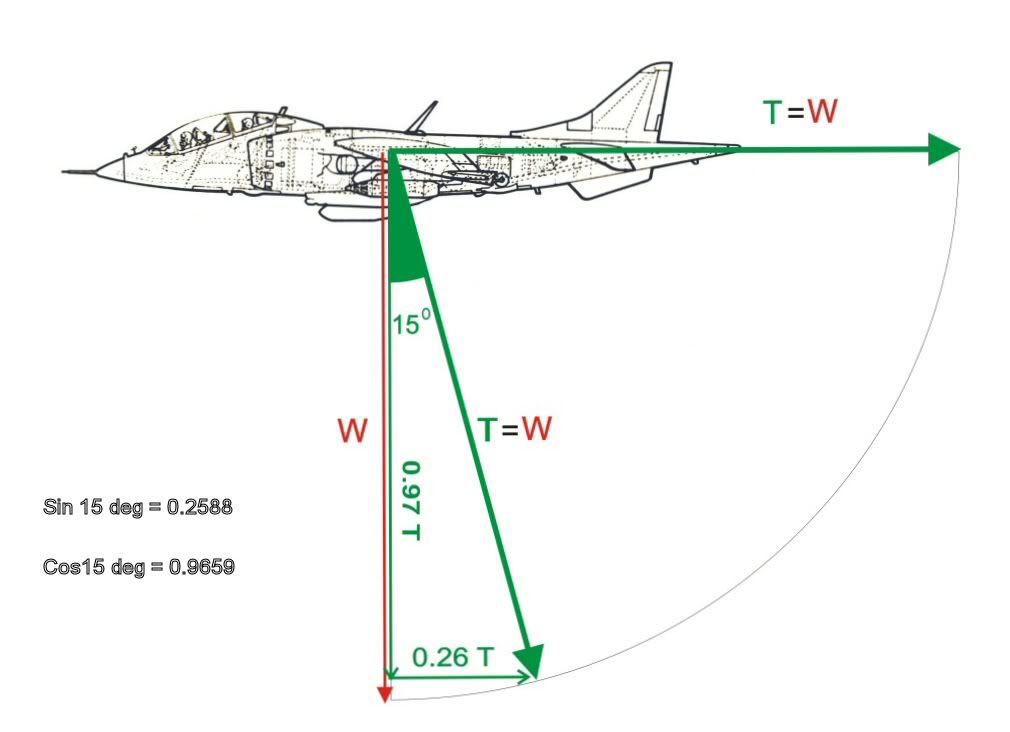
This diagram shows that in the hover if you rotate the thrust vector 15 deg aft of the hover angle you IMMEDIATELY generate a 0.26 g longit accel but thanks to the trig relationship you only loose 0.03% of your vertical component � hence the desirability of the slight initial drift upwards from the VTO or hover. Pure magic and on first acquaintance it appears to mean you get something (0.26 g accel) for nothing.
0.26 g is of course quite a brisk accel and soon leads to airspeed and wing lift. Once this builds a climb will result unless you continue to rotate the vector. This is all a lot easier to do than write about. Many Harrier pilots in two nations were converted to doing this with no simulators and no two-seaters without trouble.
Decel. Transition � in normal wingborne flight go downwind at normal circuit speeds (say 1.3 to 1.5 stall speed � it is not at all critical) deal with gear and flaps as usual and turn base. Roll out a mile or so before you want to hover and SELECT the thrust vector to the hover position. (This is a true �selection� not a flying control type of action).
Once you do that you have chopped off all �thrust� and the aircraft will slow down quickly thanks to the drag. NOW IN YOUR HEAD
HOVER the aircraft and ignore the speed which is still present. IE control height with power and maintain the hover attitude. As speed and wing lift washes off increase power to maintain the approach path you require until you find yourself in the hover.
With practice it is easy to select a particular hover point by small adjustments to the pitch attitude or thrust vector angle, but that is exercise two not one.
JF