Originally Posted by
Hughes500
well that might bugger Robinson sales in NZ !!!
Possibly, which can be adverse as well to the industry, the RHC product fills a niche and sales suggest it is a needed part of the industry.
Since the advent of teeter rotor systems there have been issues with mast bumping, low-g, turbulence and push over maneuvers. The RHC rotor head itself, as designed by Frank is not itself any worse than any other teeter system in this regard, so long as the tensions on the teeter hinge and the coning hinges are correct.
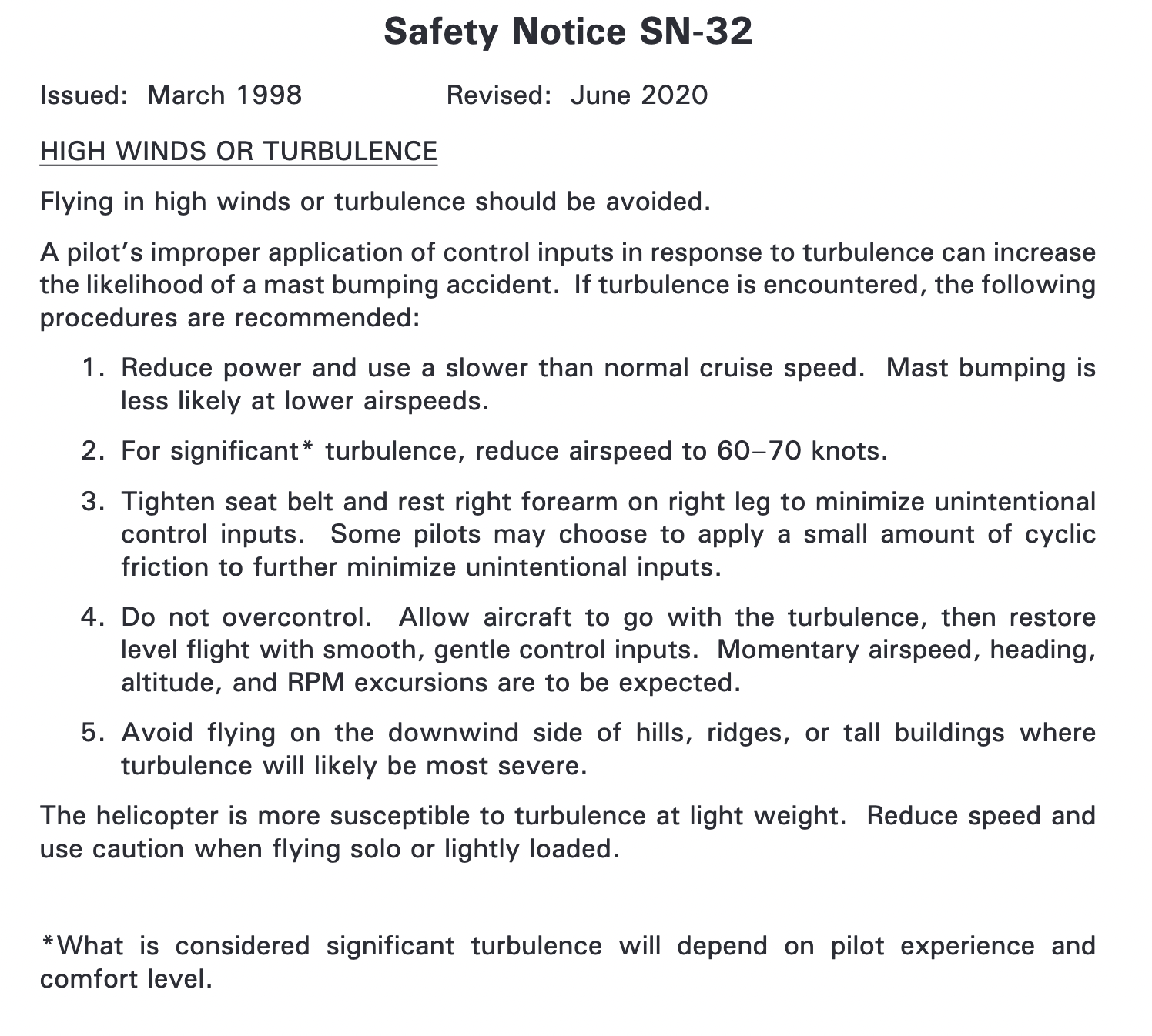
The SN of interest have been out for a long time, and no one that trains on a RHC helicoper should be unaware of the need to maintain a load on the rotor head at all times.
Turbulent conditions call for lower speeds to reduce the probability of unloading the rotor. However, what appears to not be mentioned is that while that is necessary, the control system of the helicopter introduces a flexible component in the control system, that is the pilots right arm. The body of the pilot is not rigid, nor are the limbs that connect from the pilot to the cyclic... the response of the body to reduced g will result in uncommanded motion of the extremities, exacerbating the reduced g load on the underslung mass of the helicopter. The control of the teeter head relies completely on there being a load under the teeter hinge and down to the swash plate. When there is a possibility of turbulence, it is conceivable that the pilots do not consider that the condition may get to zero g, which is severe, however, the inadvertent arm movement in low g may induce a forward cycle input that will lead rapidly to mast bump events.
Low speed is certainly called for; bracing your right arm to your body may also assist in reducing unwanted cyclic motion.
RHC makes a fine, minimalist device, they are fantastic when flown with care, but they need constant awareness of the risk involved in any part of the operation from pulling them out of the hangar to putting them back inside afterwards. The faster you are going in the machine, the higher the potential for achieving a low g condition though a surprise or any condition that results in an instinctive or accidental reaction.
It begs a question if a control loading could be added that was responsive to speed and low g, to add an aft cyclic input if a low g condition is sensed at speeds above ETL. The response rate would have to be pretty quick, the blades are at ~7Hz, 2 blades, so the response time is pretty short... but the good news is the very low control loads would not require a large input force. Most of my time on the RHC was involved in doing odd things with them, and so the preparation for every flight was comprehensive, the instructor in the field will have more familiarity but less time to consider each aspect of the flight and to determine the risk related to each phase of flight. For my R22 and R44 we avoided high speed operations unless called for in a flight profile, and then they were subject to a full THA. Irrespective of that, every flight at high speed needs to be conducted with caution, and that is within the normal envelope, the helicopter can bite back.
I thoroughly enjoy flying the RHC products, the R-22 remains one of my favorite machines, it is the Pitts S-1 of the helicopter world; it talks back to the pilot for every error they make.