


B-738 Crash in Russia Rostov-on-Don

Join Date: Aug 2008
Location: Betwixt and between
Posts: 666
Likes: 0
Received 0 Likes
on
0 Posts
01:40:50GMT ‘Pull! Pull! Pull!
01:40:54GMT ‘Aaaaaa’
01:40:54GMT ‘Aaaaaa’
Also, the notion that the pilot accidentally held the trim button down to such an extreme degree is something i find very very hard to believe. It is actually quite ridiculous. It is much more likely that, in a dark noisy 737 cockpit, the continuous and uncommanded motion of the trim wheel could have easily not be noticed,especially in rough air and considering that many crew wear ANC headsets to protect their hearing which do attenuate all cockpit noises to varying degrees.
Last edited by Sciolistes; 26th Mar 2016 at 03:59.

Join Date: Apr 2009
Location: Oakland, CA
Age: 72
Posts: 427
Likes: 0
Received 0 Likes
on
0 Posts
I agree about this accidental pressing on the switch but I also find this uncommanded motion of trim very hard to swallow. We better have a theory why their vertical speed varied widely from +6000 fpm down to +2000 fpm and then up again to +4000 fpm (all within about 75 sec) to finally plummet to negative values. I don't see how uncommanded trim motion in the same direction would help explaining that.
Join Date: May 2012
Location: Virginia
Posts: 9
Likes: 0
Received 0 Likes
on
0 Posts
Quick Question
Also really quick: I am wondering what happened about 30 sec prior to the last data point, and about 32 sec prior to impact 
I plotted the comparison between first and second attempts relative to when each attempt both descended through 1500' GPS altitude. (Point in question is near 65 sec past in second attempt.)
Images via Flickr:
GPS altitude and estimated pitch: https://flic.kr/p/FEWW2p
Est Vert Accel and est pitch: https://flic.kr/p/EKvmjG
If any are interested in the calcs I did (hopefully correctly), I'm happy to share the Excel file.
Images via Flickr:GPS altitude and estimated pitch: <a href=https://flic.kr/p/FEWW2p target=_blank>https://flic.kr/p/FEWW2p</a> Est Vert Accel and est pitch: <a href=https://flic.kr/p/EKvmjG target=_blank>https://flic.kr/p/EKvmjG</a>If any are interested in the calcs I did (hopefully correctly), I'm happy to share the Excel file.)
I plotted the comparison between first and second attempts relative to when each attempt both descended through 1500' GPS altitude. (Point in question is near 65 sec past in second attempt.)
Images via Flickr:
GPS altitude and estimated pitch: https://flic.kr/p/FEWW2p
Est Vert Accel and est pitch: https://flic.kr/p/EKvmjG
If any are interested in the calcs I did (hopefully correctly), I'm happy to share the Excel file.

Join Date: Jan 2011
Location: island
Posts: 1
Likes: 0
Received 0 Likes
on
0 Posts
This question is equally puzzling to me:
How could the plane have gone from 0� bank angle to 45�-90� bank angle
WITHOUT lateral course deviation ?
FZ981 was well lined up with the runway on second/final approach, hence ~0� bank angle:

Even AFTER "start of dive" FZ981 continues on its straight ground track without almost
any lateral deviation. Here better seen from above:
But during the fatal dive, FZ981 had a bank angle somewhere between 45�-90� (probably
closer to 90�), as can be seen in the various videos posted here:
http://youtu.be/9aBq8saXy2M
Pause this video in a precise moment between 0:06 and 0:07 so that aircraft in fall (or rather its lights) can be seen shortly becore impact. Observe the position of landing lights. Conclude the bank angle being close to 90 degrees left, with a steeply negative pitch attitude.

Nevertheless during [final approach + GA + fatal dive] FZ981 doesn't sensibly deviate
from its straight ground track, which can not only be seen in image #2 above but is also
corroborated by the plane crashing onto the runway (hence no lateral deviation):

avherald says: "Radar data suggest the aircraft on final approach was to the left of the localizer and just to the
left of the left runway edge and corrected to the right while over the runway bringing the aircraft just within the
runway edges moments before ground contact."

So how does the plane go from 0� to 45�-90� bank angle without lateral deviation ?
Forward motion provided, a passenger jet makes a turn when it banks, isn't it ?
- the plane banked (see image #3 above)
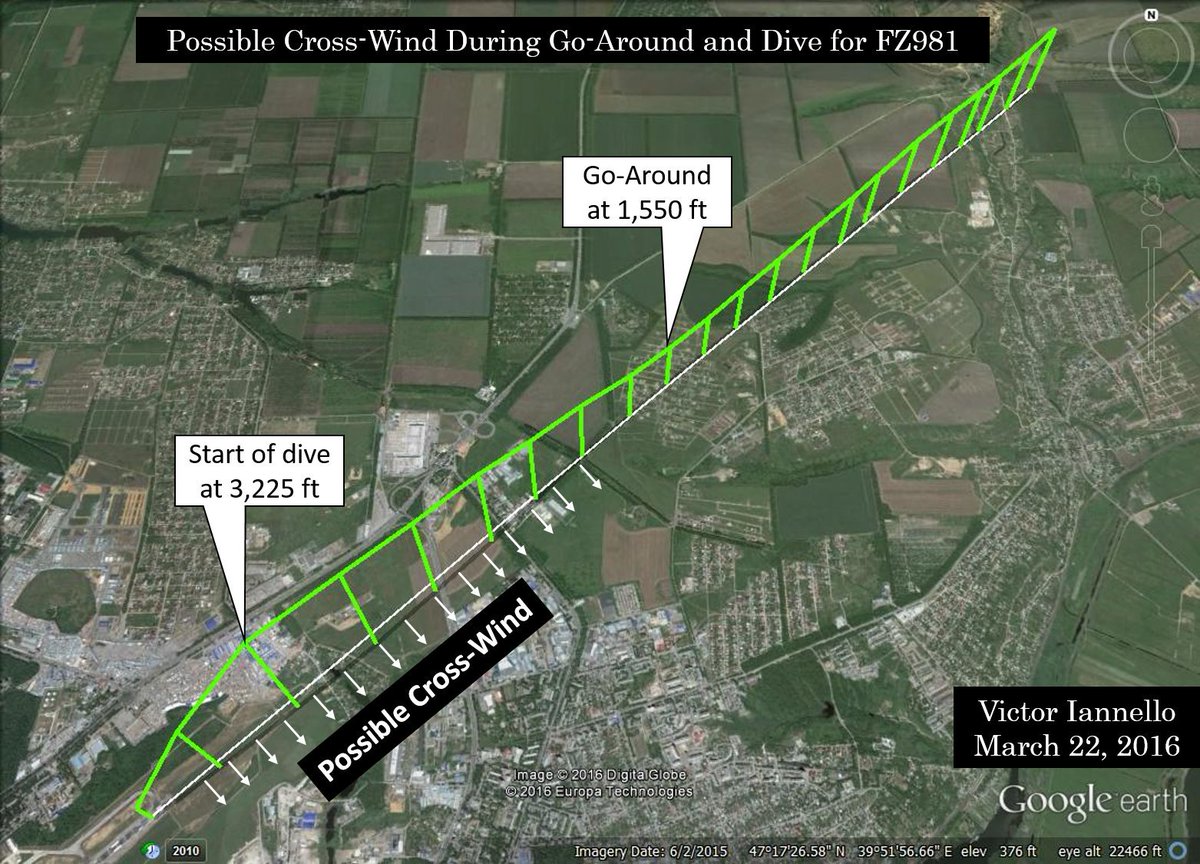
- the plane was in forward motion: 200 kts when starting to bank and it still kept some forward motion during the final dive (see images below)
- yet the plane didn't make a turn (image #2) but crashed onto the runway (image #5)
images showing forward motion (and banking) throughout the final dive:


(Google Earth Images produced by IG member Victor Ianello)
Join Date: Aug 2008
Location: Betwixt and between
Posts: 666
Likes: 0
Received 0 Likes
on
0 Posts
A trim runaway of jammed elevator does seem unusual. But as they are QRH procedures then one assumes they are conceivable. It would also explain the disengagement of the A/P - again probably uncommanded. If the rate of climb was undesirable, the initial reaction by the crew would have probably been to select Vertical Speed mode and not disconnect (unless it was extreme - which it does not appear to be).
Regarding the vertical speed values and ground speed values. I don't see too much wrong with this. We know they were in rough air, rough enough for them to not want to continue the approach. Perhaps we can expect bumps and spikes in speeds and altitudes over that time. The general trends look consistent with an initial climb, acceleration to commanded speed and then once that speed was reached another steeper climb.
Does anybody know how the Mode S system derives or calculates these values? Obviously vertical speed is a function of altitude change over time and ground speed of position change over time. If the Mode S system calculates these values rather than extracting directly from the Air Data Computer then perhaps we can expect the data to be somewhat erratic depending on the sampling rate (frequency) of altitude and position data by the Mode S system. It would seem sensible for these values to be calculated from a systems integration unit interoperability point of view. If I was the designer of the Mode S system, I think I would calculate as much as possible within the module.
Regarding the vertical speed values and ground speed values. I don't see too much wrong with this. We know they were in rough air, rough enough for them to not want to continue the approach. Perhaps we can expect bumps and spikes in speeds and altitudes over that time. The general trends look consistent with an initial climb, acceleration to commanded speed and then once that speed was reached another steeper climb.
Does anybody know how the Mode S system derives or calculates these values? Obviously vertical speed is a function of altitude change over time and ground speed of position change over time. If the Mode S system calculates these values rather than extracting directly from the Air Data Computer then perhaps we can expect the data to be somewhat erratic depending on the sampling rate (frequency) of altitude and position data by the Mode S system. It would seem sensible for these values to be calculated from a systems integration unit interoperability point of view. If I was the designer of the Mode S system, I think I would calculate as much as possible within the module.
Join Date: Oct 2008
Location: UK
Posts: 361
Likes: 0
Received 0 Likes
on
0 Posts
From my limited understanding of the transcript, it reads as though the aircraft encountered wind shear during the go around, whether annunciated or crew detected. It appears that the autopilot was then disconnected, presumably manually, to fly through the shear. This is probably an automatic response to training, as I suspect many operators do not routinely teach the autopilot coupled escape manoeuvre.
If the aircraft is for some reason grossly out of trim, this will have been masked by the autopilot, and the out of trim condition only apparent on disconnection. Assuming that the trim is for nose down, it would explain the pitch over. This will almost certainly have come as a surprise to the crew, but the "Don't worry, don't worry" sounds like it could be the captain, and indicates to me he has recognised a problem and at this moment feels it is something he can control. The subsequent CVR transcript of "Don't do this" I'm pretty sure is directed at the aircraft and would suggest that the aircraft is not responding as expected.
Why they couldn't recover, only further investigation will tell.
If the aircraft is for some reason grossly out of trim, this will have been masked by the autopilot, and the out of trim condition only apparent on disconnection. Assuming that the trim is for nose down, it would explain the pitch over. This will almost certainly have come as a surprise to the crew, but the "Don't worry, don't worry" sounds like it could be the captain, and indicates to me he has recognised a problem and at this moment feels it is something he can control. The subsequent CVR transcript of "Don't do this" I'm pretty sure is directed at the aircraft and would suggest that the aircraft is not responding as expected.
Why they couldn't recover, only further investigation will tell.
Join Date: Aug 2012
Posts: 1
Likes: 0
Received 0 Likes
on
0 Posts
knyupel thingy
Just found this on "vesti" website.
http://www.vesti.ru/doc.html?id=2735707
The phrase itself, if translated to English, would suggest that the knyupel thing is responsible for re-posistioning of a horiz.stab ...
Direct translation is:
It is a question why the stabilizer was activated(started trimming, I presume) nose-down (пике literally means - negative pitch situation).
It (stab) is activated by a button that pilots call knyupel.
And I have to warn that this is a news organization and normally, when they post something about aviation or any other technical field, their wording in those articles usually sounds extremely weird and cumbersome.
http://www.vesti.ru/doc.html?id=2735707
Почему включился в режим пике стабилизатор — вопрос. Он приводится в действие кнопкой, которую пилоты называют "кнюпель".
Direct translation is:
It is a question why the stabilizer was activated(started trimming, I presume) nose-down (пике literally means - negative pitch situation).
It (stab) is activated by a button that pilots call knyupel.
And I have to warn that this is a news organization and normally, when they post something about aviation or any other technical field, their wording in those articles usually sounds extremely weird and cumbersome.
Last edited by Sunamer; 26th Mar 2016 at 06:01. Reason: added source
It is a question why the stabilizer was activated(started trimming, I presume) nose-down (пике literally means - negative pitch situation)
Join Date: May 2008
Location: Hang on, let me check the FMS...
Posts: 195
Likes: 0
Received 0 Likes
on
0 Posts
Hypothetically, if during the GA at light weights with full thrust and flaps down, the PF trimmed almost full nose down at high trim speed (the 737 trim is faster when flaps are down) to keep the nose up attitude under control.
Then when levelling off the speed increases rapidly, so PF makes a large thrust reduction while PM is retracting flaps correctly according to the speed schedule.
The aircraft will then have a large pitch down motion due to reduction of thrust, coupled with the nose down trim position and then with the flaps now up, a slower trim wheel or maybe no trim adjustment at all due to a failure or pilot error/fatigue, would the PF have enough elevator authority to correct the aircraft attitude?
The CVR transcripts says the autopilot disconnected, the PF could try and engage the autopilot but if grossly out of trim, would immediately disengage and the autopilot disconnect horn would sound in the flight deck.
Then when levelling off the speed increases rapidly, so PF makes a large thrust reduction while PM is retracting flaps correctly according to the speed schedule.
The aircraft will then have a large pitch down motion due to reduction of thrust, coupled with the nose down trim position and then with the flaps now up, a slower trim wheel or maybe no trim adjustment at all due to a failure or pilot error/fatigue, would the PF have enough elevator authority to correct the aircraft attitude?
The CVR transcripts says the autopilot disconnected, the PF could try and engage the autopilot but if grossly out of trim, would immediately disengage and the autopilot disconnect horn would sound in the flight deck.
Join Date: Dec 2013
Location: Paso Robles
Posts: 261
Likes: 0
Received 0 Likes
on
0 Posts
It appears that the autopilot was then disconnected,
Join Date: Nov 2009
Location: Poland
Age: 37
Posts: 15
Likes: 0
Received 0 Likes
on
0 Posts
I believe re-engaging AP during a flight director go-around is a standard procedure? It can get messy with the AP modes (LVL CHG), full thrust, flap retraction, trimming.
Join Date: Dec 2013
Location: Paso Robles
Posts: 261
Likes: 0
Received 0 Likes
on
0 Posts
I believe re-engaging AP during a flight director go-around is a standard procedure?
Join Date: Jul 2005
Location: btw SAMAR and TOSPA
Posts: 566
Likes: 0
Received 0 Likes
on
0 Posts
A trim runaway of jammed elevator does seem unusual. But as they are QRH procedures then one assumes they are conceivable. It would also explain the disengagement of the A/P - again probably uncommanded. If the rate of climb was undesirable, the initial reaction by the crew would have probably been to select Vertical Speed mode and not disconnect (unless it was extreme - which it does not appear to be).
Regarding the vertical speed values and ground speed values. I don't see too much wrong with this. We know they were in rough air, rough enough for them to not want to continue the approach. Perhaps we can expect bumps and spikes in speeds and altitudes over that time. The general trends look consistent with an initial climb, acceleration to commanded speed and then once that speed was reached another steeper climb.
Does anybody know how the Mode S system derives or calculates these values? Obviously vertical speed is a function of altitude change over time and ground speed of position change over time. If the Mode S system calculates these values rather than extracting directly from the Air Data Computer then perhaps we can expect the data to be somewhat erratic depending on the sampling rate (frequency) of altitude and position data by the Mode S system. It would seem sensible for these values to be calculated from a systems integration unit interoperability point of view. If I was the designer of the Mode S system, I think I would calculate as much as possible within the module.
Regarding the vertical speed values and ground speed values. I don't see too much wrong with this. We know they were in rough air, rough enough for them to not want to continue the approach. Perhaps we can expect bumps and spikes in speeds and altitudes over that time. The general trends look consistent with an initial climb, acceleration to commanded speed and then once that speed was reached another steeper climb.
Does anybody know how the Mode S system derives or calculates these values? Obviously vertical speed is a function of altitude change over time and ground speed of position change over time. If the Mode S system calculates these values rather than extracting directly from the Air Data Computer then perhaps we can expect the data to be somewhat erratic depending on the sampling rate (frequency) of altitude and position data by the Mode S system. It would seem sensible for these values to be calculated from a systems integration unit interoperability point of view. If I was the designer of the Mode S system, I think I would calculate as much as possible within the module.
MSL altitiude is from GPS (height over ellipsoid) and transmitted as an offset to QNE baro altitude.
Open remains the source of VS. There are two options: GPS or Baro. Depends on the supplier of the avionics.
Join Date: Oct 2008
Location: UK
Posts: 361
Likes: 0
Received 0 Likes
on
0 Posts
The weird vertical speed gyrations aren't unheard of when the autopilot is controlling the aircraft in low level turbulence. It flies like a piece of cr@p. It wouldn't be unusual for a pilot to disconnect and fly an average pitch attitude through it and accept a small amount of speed deviation.
Join Date: Aug 2000
Location: Monrovia / Liberia
Age: 63
Posts: 757
Likes: 0
Received 0 Likes
on
0 Posts
On the B737, during a 'dual channel' approach (i.e. an approach being made with both autopilots engaged), a press of a TOGA button will cause the aircraft to go-around and the autopilot / auto-throttle will remain engaged (i.e. the autopilot / auto-throttle will fly the go-around, all the pilots then have to do is raise the landing gear, and move the flap lever in order to accelerate the aircraft).
During a single channel approach (i.e. an approach made with just one autopilot engaged), a press of the TOGA button will cause the selected autopilot to disengage (along with an associated aural warning of such), it's then up to the pilots to action the go-around manoeuvre and all subsequent associated actions.
In flydubai 'dual-channel' approaches are not approved, wherein Cat II / Cat III (low visibility approaches & landings) are entirely hand-flown via use of the HGS / HUD... and accordingly it would be true to say that ALL landings in flydubai are hand-flown (i.e. use of 'auto-land' is not permitted) and therein at some point during an approach (regardless of it being either Cat I/II/III) the autopilot must be disconnected, and following which the remainder of the approach & landing (or go-around) is flown manually.
During a go-around, the normal procedure is to hand-fly the aircraft until the flaps are fully up and then to engage the autopilot... that said, some might (for workload reasons) engage an autopilot & auto-throttle once the aircraft is above the autopilot's 'minimum use height'.
During a single channel approach (i.e. an approach made with just one autopilot engaged), a press of the TOGA button will cause the selected autopilot to disengage (along with an associated aural warning of such), it's then up to the pilots to action the go-around manoeuvre and all subsequent associated actions.
In flydubai 'dual-channel' approaches are not approved, wherein Cat II / Cat III (low visibility approaches & landings) are entirely hand-flown via use of the HGS / HUD... and accordingly it would be true to say that ALL landings in flydubai are hand-flown (i.e. use of 'auto-land' is not permitted) and therein at some point during an approach (regardless of it being either Cat I/II/III) the autopilot must be disconnected, and following which the remainder of the approach & landing (or go-around) is flown manually.
During a go-around, the normal procedure is to hand-fly the aircraft until the flaps are fully up and then to engage the autopilot... that said, some might (for workload reasons) engage an autopilot & auto-throttle once the aircraft is above the autopilot's 'minimum use height'.
Join Date: Aug 2012
Posts: 1
Likes: 0
Received 0 Likes
on
0 Posts
"They could possibly mean the stab itself was trimming nose down, meaning an aircraft pitch up reaction."
Пике (pee'ke(a)) - is a nose DOWN attitude.
I am a little bit surprised that nobody has mentioned the speed trim system in this conversation.
If indeed the horizon-stab ended up positioned to fly the nose of the aircraft down, then the STS is one of several ways that it can get there.
The horizon-stab could get there through some sort of failure.
It could get there by being manually motored there by the PF.
It could get there by being motored there by the STS.
What conditions would result in the STS motoring the stabiliser 'aircraft nose down' ?
1/ The A/P must not be engaged
2/ High thrust settings and light weights
3/ Airspeed decaying below target speed
So when we see 6000fpm climb, I wonder if an increasing headwind has resulted in higher attitudes being flown and when the head wind stabilises that attitude is too high, speed decays, STS try's to compensate by trimming forward.
If this did occur then another hole has lined up as well because elevator should be able to control the attitude even if this has happened.
Where you would be in trouble though is if you let the nose get too low in conjunction with the ' nose down stabiliser' and then tried to recover solely with elevator.
My understanding is that elevator can override the stab position but if you have an aircraft pointing downhill and are trying to bring it out with the (relatively) small elevators, you'd want either lots of height or not too much nose down attitude.
That's just my thoughts, I'm not suggesting it applies to this flight ( or even that my assessment of elevator capability is accurate) but I am surprised that the STS hasn't been discussed yet.
Thoughts?
If indeed the horizon-stab ended up positioned to fly the nose of the aircraft down, then the STS is one of several ways that it can get there.
The horizon-stab could get there through some sort of failure.
It could get there by being manually motored there by the PF.
It could get there by being motored there by the STS.
What conditions would result in the STS motoring the stabiliser 'aircraft nose down' ?
1/ The A/P must not be engaged
2/ High thrust settings and light weights
3/ Airspeed decaying below target speed
So when we see 6000fpm climb, I wonder if an increasing headwind has resulted in higher attitudes being flown and when the head wind stabilises that attitude is too high, speed decays, STS try's to compensate by trimming forward.
If this did occur then another hole has lined up as well because elevator should be able to control the attitude even if this has happened.
Where you would be in trouble though is if you let the nose get too low in conjunction with the ' nose down stabiliser' and then tried to recover solely with elevator.
My understanding is that elevator can override the stab position but if you have an aircraft pointing downhill and are trying to bring it out with the (relatively) small elevators, you'd want either lots of height or not too much nose down attitude.
That's just my thoughts, I'm not suggesting it applies to this flight ( or even that my assessment of elevator capability is accurate) but I am surprised that the STS hasn't been discussed yet.
Thoughts?