


Engineering Challenges Facing New VTOL Aircraft

Thread Starter
Join Date: Jul 2021
Location: Southern United States
Posts: 122
Likes: 0
Received 60 Likes
on
30 Posts
Engineering Challenges Facing New VTOL Aircraft
I decided to start a new thread to maybe contain discussions around engineering challenges that some of the new VTOL technologies currently being developed are facing, and possibly how systems are developed, by some of the people that know how “the sausage is made”.
There’s naturally a lot of discussion around V-280, X2 technology etc what with the various US Army programs that have been awarded or will be awarded in the future, but I’d love to see discussion on other VTOL tech as well.
Even the Bell Invictus, while appearing to be a more “conventional” helicopter, will undoubtedly seek to leverage advancements in flight controls and drivetrain technology that have happened in the past decades since our current frontline rotary wing platforms entered service.
I know several members here have the education and real-world experience working through these sort of issues and can explain the physics of it to laymen like myself, I greatly appreciate reading and learning and I’m sure I’m not the only one.
Anyway, here’s the thread. Whoever has questions about all this new technology, throw them up here!
FltMech
There’s naturally a lot of discussion around V-280, X2 technology etc what with the various US Army programs that have been awarded or will be awarded in the future, but I’d love to see discussion on other VTOL tech as well.
Even the Bell Invictus, while appearing to be a more “conventional” helicopter, will undoubtedly seek to leverage advancements in flight controls and drivetrain technology that have happened in the past decades since our current frontline rotary wing platforms entered service.
I know several members here have the education and real-world experience working through these sort of issues and can explain the physics of it to laymen like myself, I greatly appreciate reading and learning and I’m sure I’m not the only one.
Anyway, here’s the thread. Whoever has questions about all this new technology, throw them up here!
FltMech

The following 3 users liked this post by 60FltMech:
Excellent offering and hopefully it shall turn out to be a learning source for a lot of us not so involved in the technical side of things.
60FltMech: I'll enjoy reading posts prompted by your thread.
I had been reading posts in the threads "Hill Helicopters HX50", "Marenco Swiss Helicopter" and "new gyroplane". These are start-up ventures, or began that way. That seems brave nowadays. The competition in the market and required finances are perhaps greater challenges than any engineering challenges they will face.
I had been reading posts in the threads "Hill Helicopters HX50", "Marenco Swiss Helicopter" and "new gyroplane". These are start-up ventures, or began that way. That seems brave nowadays. The competition in the market and required finances are perhaps greater challenges than any engineering challenges they will face.
60FltMech: I'll enjoy reading posts prompted by your thread.
I had been reading posts in the threads "Hill Helicopters HX50", "Marenco Swiss Helicopter" and "new gyroplane". These are start-up ventures, or began that way. That seems brave nowadays. The competition in the market and required finances are perhaps greater challenges than any engineering challenges they will face.
I had been reading posts in the threads "Hill Helicopters HX50", "Marenco Swiss Helicopter" and "new gyroplane". These are start-up ventures, or began that way. That seems brave nowadays. The competition in the market and required finances are perhaps greater challenges than any engineering challenges they will face.
The following users liked this post:
As to the eVTOL certification side, I believe the EASA has elected to create a new regulatory part for eVTOLs that will be much leaner than the conventional aircraft rules and use more consensus standards. I don't follow the EASA side much but the FAA has decided the same for a new part after trying to fit eVTOLs into the Part 23 structure. Haven't seen any details as yet, but several of the leading eVTOL manufacturers are progressing through the certification requirements on both sides of the pond as they are written. From what I've seen and read in a limited capability, I think we'll see certified Part 135 eVTOLs pax ops before you know it provided they don't start falling out the air and killing people.
While the designs and mechanics of conventional VTOLs are very interesting and which I've followed since the XV-15 days, I think outside of the military and a few AW609 customers the eVTOL industry will be the common player. How the 4-6 pax eVTOL will fit into the big regulatory picture with conventional VTOLs, rotorcraft, and other hybrid aircraft will be the most interesting development.
One area of technology where there exists a vacuum is the absence of design standards for modern ( i.e., Fly-By-Wire ) control systems. Some might argue that is good, because the technology leaders in this area are all working for private companies, and asking for either the FAA or the various military organizations to generate standards is in fact asking for trouble because neither has experienced staff in this area. I am of that bent. So, how does this get done? Or, does it need to be done?
Thread Starter
Join Date: Jul 2021
Location: Southern United States
Posts: 122
Likes: 0
Received 60 Likes
on
30 Posts
JohnDix,
When I wrote the post opening this thread I had two questions in mind that I wanted to ask: first was about fly by wire and the second question, which is regarding flight control hydraulic systems.
It seems that if you could develop a rugged fly by wire system you would be well on your way to simplifying your flight control hydraulic systems.
Regarding V-280, I assume Bell will use what they have learned on their 525 FBW and hydraulic systems. But as you pointed out the standards for such systems for VTOL aircraft aren’t fully established, so how does it all come together in the end?
I just can’t see an aircraft with a mass of push pull tubes, mixers, bellcranks and Hydraulic lines being the future of Army Aviation(or VTOL in general), someone has to crack the code on simplifying these systems, while also keeping redundancy for battle damage or other emergencies.
FltMech
When I wrote the post opening this thread I had two questions in mind that I wanted to ask: first was about fly by wire and the second question, which is regarding flight control hydraulic systems.
It seems that if you could develop a rugged fly by wire system you would be well on your way to simplifying your flight control hydraulic systems.
Regarding V-280, I assume Bell will use what they have learned on their 525 FBW and hydraulic systems. But as you pointed out the standards for such systems for VTOL aircraft aren’t fully established, so how does it all come together in the end?
I just can’t see an aircraft with a mass of push pull tubes, mixers, bellcranks and Hydraulic lines being the future of Army Aviation(or VTOL in general), someone has to crack the code on simplifying these systems, while also keeping redundancy for battle damage or other emergencies.
FltMech
I too look forward to seeing this kind of discussion becoming more prevalent as the forum needs some fresh topics for consideration.
Thank you 60FltMech for creating this thread and I shall look forward to more in the future.
A 2016 article, but some interesting points being made re DARPA and its ability to be innovative.
Is there a genuine inability of the US Military (US DOD) to find solutions for the new generation rotorcraft/tilt rotor/or whatever you want to call the new concepts?
https://www.darpa.mil/attachments/DA...ation_2016.pdf
A later article reporting DARPA and Sikorsky UH-60 FBW research.
https://idstch.com/military/air/darp...omous-landing/
Thank you 60FltMech for creating this thread and I shall look forward to more in the future.
A 2016 article, but some interesting points being made re DARPA and its ability to be innovative.
Is there a genuine inability of the US Military (US DOD) to find solutions for the new generation rotorcraft/tilt rotor/or whatever you want to call the new concepts?
https://www.darpa.mil/attachments/DA...ation_2016.pdf
A later article reporting DARPA and Sikorsky UH-60 FBW research.
https://idstch.com/military/air/darp...omous-landing/
From my understanding it depends on the integration of the FBW. For the Bell 525 FBW the FAA issued Special Conditions to its certification basis under Part 29. See below. I also believe for the AW609, its flight control certifications will be dealt with under the new Powered-Lift category's certification requirements which has been described as a collection of existing Part 23, 25, and 29 requirements. However, my info is a bit dated on the 609.
Special Conditions: Bell Textron Inc. Model 525 Helicopter; Fly-By-Wire Flight Control System
Special Conditions: Bell Textron Inc. Model 525 Helicopter; Fly-By-Wire Flight Control System
I for one think that the most obvious improvement to a conventional helicopter would be a swiveling tail rotor. I am surprised that only Karem ventured into that technology... to no avail so far. Why is it so difficult to implement, compared to seemingly much more complex designs?
I for one think that the most obvious improvement to a conventional helicopter would be a swiveling tail rotor. I am surprised that only Karem ventured into that technology... to no avail so far. Why is it so difficult to implement, compared to seemingly much more complex designs?
In the end, you can achieve near 200 knots in a more conventional helicopter without a prop or swiveling prop. If you desire going much faster than that, a tilt rotor ends up being the better answer and really the only answer at around 250 knots and above. So there is a possible range of 200 to 250 knot target cruise speed where some sort of thrust compounded helicopter MIGHT be a better balanced design than the alternatives, but that's an awfully narrow range to spend a lot of development time/effort into. It also requires a lower drag main rotor/hub and aircraft than is typically achievable.
The Airbus Racer or X3 concept is interesting and can achieve high speeds, but the main rotor is significantly offloaded via wings (like other high speed conventional helicopters) and there is no swivel function as yaw control comes from differential blade pitch across two smaller props. This configuration might practically fill that 200 - 250 knot gap, maybe.
Short answer: wings are simpler and cheaper than props to get a helicopter to 200 knots... if you want more speed than that, the tilt rotor appears to be the ideal answer. Airbus is working a hybrid concept that might fill the gap between the two.
I think you'll find the VTOL and the eVTOL industries are two distinct and separate markets especially on the civilian side. I watched the civil VTOL market evaporate from the anticipated 1000 projected units to basically none. On the other hand, the eVTOL market has exploded and is projected to be a $30B market by 2030. Plus it has the high end money behind it.
As to the eVTOL certification side, I believe the EASA has elected to create a new regulatory part for eVTOLs that will be much leaner than the conventional aircraft rules and use more consensus standards. I don't follow the EASA side much but the FAA has decided the same for a new part after trying to fit eVTOLs into the Part 23 structure. Haven't seen any details as yet, but several of the leading eVTOL manufacturers are progressing through the certification requirements on both sides of the pond as they are written. From what I've seen and read in a limited capability, I think we'll see certified Part 135 eVTOLs pax ops before you know it provided they don't start falling out the air and killing people.
While the designs and mechanics of conventional VTOLs are very interesting and which I've followed since the XV-15 days, I think outside of the military and a few AW609 customers the eVTOL industry will be the common player. How the 4-6 pax eVTOL will fit into the big regulatory picture with conventional VTOLs, rotorcraft, and other hybrid aircraft will be the most interesting development.
As to the eVTOL certification side, I believe the EASA has elected to create a new regulatory part for eVTOLs that will be much leaner than the conventional aircraft rules and use more consensus standards. I don't follow the EASA side much but the FAA has decided the same for a new part after trying to fit eVTOLs into the Part 23 structure. Haven't seen any details as yet, but several of the leading eVTOL manufacturers are progressing through the certification requirements on both sides of the pond as they are written. From what I've seen and read in a limited capability, I think we'll see certified Part 135 eVTOLs pax ops before you know it provided they don't start falling out the air and killing people.
While the designs and mechanics of conventional VTOLs are very interesting and which I've followed since the XV-15 days, I think outside of the military and a few AW609 customers the eVTOL industry will be the common player. How the 4-6 pax eVTOL will fit into the big regulatory picture with conventional VTOLs, rotorcraft, and other hybrid aircraft will be the most interesting development.
I think it's largely a capital and brainpower bonfire.
They may claim to be different markets but we all fight the same laws of physics and economics. Few of these companies will survive to 2030 much less be in commercial operation by 2030 in a 30 billion dollar market.
The following 2 users liked this post by SplineDrive:

I hadn't come across Racer (Rapid and Cost-Effective Rotorcraft), so looked it up too (https://en.wikipedia.org/wiki/Airbus_RACER ) and now understand it is an evolution from the X3. Wiki reports "first flight anticipated at the beginning of Q2 in 2022" but that has clearly passed so progress presumably still slowed due to COVID?
The Racer article in turn reminded me of the Piasecki X-49 and Sikorsky X2 as compound helicopters of 'comparable' configuration. The X-49 (and its predecessors) seemed like a mechanically straightforward alternative to any swivelling tail rotor concepts. Is there any future in such an arrangement as opposed to the X3 / Racer configuration?
Finally, is there any future in revisiting the DTNSRDC X-wing concept that had been built and fitted to the S-72 (https://en.wikipedia.org/wiki/Sikorsky_S-72), but was never flight tested? It seemed like a radical idea to achieve high speed flight of a rotorcraft at the time. Rotor is only used for take-off then becomes stationary for high-speed forward flight. Not sure how they managed to solve the problem of the aerodynamic loading on the forward swept pair of stationary blades (wings)!
Maybe this doesn’t make sense, but here goes: one thing that puzzles me a little, perhaps only because of my own ignorance, is that for pushing air downwards (ie VTOL) development efforts have focused almost entirely on what are effectively propellers – one or two big unshielded rotating wings, or sometimes lots of small ones – whereas for pushing air backwards (runway takeoff), jet propulsion is increasingly the norm, on smaller and smaller aircraft, now down to the VLJ category.
Of course the military have played with jet propulsion to push air downwards, with vectored thrust as in the Harrier, or with lift jets or fans, but AFAIK they’re few, and vectored-thrust has mostly gone away from VTOL towards improving manoeuvrability of fighters.
Of course the military have played with jet propulsion to push air downwards, with vectored thrust as in the Harrier, or with lift jets or fans, but AFAIK they’re few, and vectored-thrust has mostly gone away from VTOL towards improving manoeuvrability of fighters.
I hadn't seen anything about the X3 for a while, so looked it up on Wikipedia (https://en.wikipedia.org/wiki/Eurocopter_X%C2%B3). It apparently achieved 255 knots in level flight in 2013, indicated to be an unofficial helicopter speed record. Yet it has already been in a museum since 2014!
I hadn't come across Racer (Rapid and Cost-Effective Rotorcraft), so looked it up too (https://en.wikipedia.org/wiki/Airbus_RACER ) and now understand it is an evolution from the X3. Wiki reports "first flight anticipated at the beginning of Q2 in 2022" but that has clearly passed so progress presumably still slowed due to COVID?
The Racer article in turn reminded me of the Piasecki X-49 and Sikorsky X2 as compound helicopters of 'comparable' configuration. The X-49 (and its predecessors) seemed like a mechanically straightforward alternative to any swivelling tail rotor concepts. Is there any future in such an arrangement as opposed to the X3 / Racer configuration?
Finally, is there any future in revisiting the DTNSRDC X-wing concept that had been built and fitted to the S-72 (https://en.wikipedia.org/wiki/Sikorsky_S-72), but was never flight tested? It seemed like a radical idea to achieve high speed flight of a rotorcraft at the time. Rotor is only used for take-off then becomes stationary for high-speed forward flight. Not sure how they managed to solve the problem of the aerodynamic loading on the forward swept pair of stationary blades (wings)!
I hadn't come across Racer (Rapid and Cost-Effective Rotorcraft), so looked it up too (https://en.wikipedia.org/wiki/Airbus_RACER ) and now understand it is an evolution from the X3. Wiki reports "first flight anticipated at the beginning of Q2 in 2022" but that has clearly passed so progress presumably still slowed due to COVID?
The Racer article in turn reminded me of the Piasecki X-49 and Sikorsky X2 as compound helicopters of 'comparable' configuration. The X-49 (and its predecessors) seemed like a mechanically straightforward alternative to any swivelling tail rotor concepts. Is there any future in such an arrangement as opposed to the X3 / Racer configuration?
Finally, is there any future in revisiting the DTNSRDC X-wing concept that had been built and fitted to the S-72 (https://en.wikipedia.org/wiki/Sikorsky_S-72), but was never flight tested? It seemed like a radical idea to achieve high speed flight of a rotorcraft at the time. Rotor is only used for take-off then becomes stationary for high-speed forward flight. Not sure how they managed to solve the problem of the aerodynamic loading on the forward swept pair of stationary blades (wings)!
The Sikorsky X-2 is a different beast. Remember my comment about X-49, X3, Invictus, and other high speed helo having wings to achieve high speed? The wing is a solution for overcoming the drop in lift/thrust performance of a flapping main rotor as the aircraft speed increases. In textbooks, this is the "Ct/sigma vs mu" plot, a way of plotting lots of rotor data in a non-dimensionalized form. Adding a wing offloads the rotor so that as aircraft speed increases the lift demand from the rotor drops to stay within its capabilities. On an aircraft without a propeller, this also means the lift available to pull the aircraft through the air via rotor flapping also drops, but if you can flap the rotor a lot and/or have a low drag fuselage in a nose down attitude, you can still achieve higher speed than usual for a helo. The propellers on X3, X-49, and AH-56, etc. replace the missing forward thrust from the main rotor with pure horizontal thrust... at the cost of adding more rotors. In the extreme, a large enough wing and prop can completely unload the main rotor and then you just need to slow the main rotor down to keep the advancing tip below Mach 1 and add tip masses to keep the rotor stable. This is the Carter Copter (and Jaunt Journey) solution. Larger and larger wings do add download, though and harm hover performance, but going fast does require more installed power on the aircraft, so that can be overcome with a larger main rotor (and more mass). There's no free lunch in any of this.
Back to X-2... it does not have a flapping main rotor, so it's Ct/sigma vs mu plot doesn't show rotor lift decreasing rapidly with increasing airspeed. The rotor itself really can move to a different level of performance at speed than conventional flapping rotors. Eliminating the flapping compliance largely eliminates the natural flap response of a rotor that keeps the center of lift over the rotor mast and rotor controls can trim the retreating blade to produce less lift and shift the rotor lift heavily onto the advancing blades. The rotor now behaves a bit more like an airplane wing which is why X-2 aircraft don't have the wing. You also eliminate the download from the wing, so the aircraft is more efficient at hover (coaxial rotors also have some efficiencies here). All this sounds great... on paper... but the Iron Law of No Free Lunch applies. The X-2 eliminates the most important invention in the history of rotary winged flight, the flapping hinge, and the consequences are severe. Rotor loads are roughly an order of magnitude higher than on a flapping rotor. Vibrations in the aircraft are severe. Hub drag is high. Part count is high. Yaw agility is low and sometimes nearly non-existent. The configuration has gone head to head with tilt rotors twice now (XH-59A vs XV-15 and SB>1 vs V-280) and lost both times. It might even lose to a simple winged helicopter in a few years. The prop isn't the key technology, its the rigid rotor that eliminates the wing, but the rigid rotor is also the source of all the aircraft problems.
X-Wing IS even more radical. It is a rigid rotor (bad) that uses a hugely complex pneumatic "swashplate" to direct variable amount of air to leading edge and trailing edge vents along the elliptical cross section blade airfoils to both control lift and simulate cyclic blade pitch (bad). Had it flown, the vibrations in horizontal flight would have been severe. The rotor design was an innovative stiff in/out of plane "bearingless" hub design that used composites to achieve the stiffnesses required to make forward swept wings work. Integrating the mechanical, pneumatic, software, and other systems together for such an aircraft led to the development of the "System Integration Lab" approach that is now common for advanced helicopter programs. The volume and power inefficiencies of the pneumatic systems and rigid rotor probably doom this concept from further development. Remember... No Free Lunch.
The following users liked this post:
Maybe this doesn’t make sense, but here goes: one thing that puzzles me a little, perhaps only because of my own ignorance, is that for pushing air downwards (ie VTOL) development efforts have focused almost entirely on what are effectively propellers – one or two big unshielded rotating wings, or sometimes lots of small ones – whereas for pushing air backwards (runway takeoff), jet propulsion is increasingly the norm, on smaller and smaller aircraft, now down to the VLJ category.
Of course the military have played with jet propulsion to push air downwards, with vectored thrust as in the Harrier, or with lift jets or fans, but AFAIK they’re few, and vectored-thrust has mostly gone away from VTOL towards improving manoeuvrability of fighters.
Of course the military have played with jet propulsion to push air downwards, with vectored thrust as in the Harrier, or with lift jets or fans, but AFAIK they’re few, and vectored-thrust has mostly gone away from VTOL towards improving manoeuvrability of fighters.
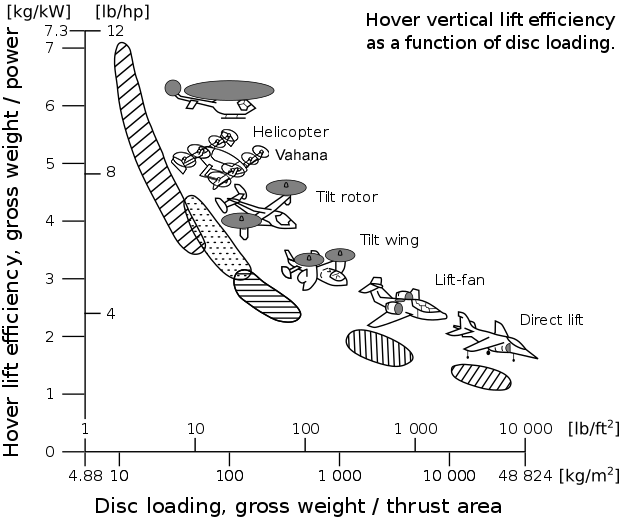
So using jets, etc. to lift the aircraft requires FAR more power than using a large rotor does.
Another key difference is the speed of the air entering the rotor/fan/jet... In a helicopter, the velocity of the air flowing in "inflow" is relatively low. In an axial flow fan or jet, it's quite high. This affects the design each system and it's hard to optimize the same thruster for both near zero inflow and very fast inflow. There's plenty more to it, but these are some big ones.
This discussion is basically the genesis of the tilt rotor: large enough rotors to be near the helicopter end of the hover efficiency plot and rotors that are too large to be optimal propellers, but good enough. The somewhat undersized rotors mean hovering requires more power installed than a normal helicopter, but that power then enables much higher cruise speeds as an airplane.
The intro sections of the NASA XV-15 monograph discuss a lot of attempts at working around the physics of the above chart. Worth a read to those interested.
https://history.nasa.gov/monograph17.pdf
The following 4 users liked this post by SplineDrive:
SplineDrive, thanks very much for that admirably clear explanation of lifting vs pushing! The graph is very helpful. It all makes complete sense now. Thanks too for the pointer to the NASA monograph – I've downloaded it for future reading.
The FAA cert basis documents for Joby and Archer are out and they both reference a requirement to be able to perform an "controlled emergency power off landing equivalent to a glide or autorotation".
Jaunt Journey can autorotate.
If referring to the proposed airworthiness criteria published in the federal register a while back that was a procedural requirement and is not the final certification basis document. 10 to 1 those conventional requirements like autorotation ability, or its equivalent, will not survive in the final eVTOL certification basis in lieu of other methods or revised criteria.
I thought Jaunt is pursuing a Part 27/29 certification?
I thought Jaunt is pursuing a Part 27/29 certification?
https://www.federalregister.gov/docu...c-model-jas4-1
It's my understanding that this is the agreed to certification basis for the Joby S4 and it agrees to modify existing language and create a new definition of "emergency controlled landing".
JS4.2105
(f) Continued safe flight and landing must be possible from any point within the flight envelope following a critical loss of thrust not shown to be extremely improbable.
(g) The aircraft must be capable of a controlled emergency landing, after loss of power or thrust, by gliding or autorotation, or an equivalent means, to mitigate the risk of loss of power or thrust.
My read is that (g) means the aircraft can protect the passengers in a power off landing, though means other than gliding or autorotation can be acceptable (like a ballistic chute). Might be a market opening for chute solutions that work at low altitudes and airspeeds.
We'll see. All these ships have a long road to certification.