


Downwash question

Can anybody tell me if there would be any rotor downwash from a pair of stationary Apaches. They were waiting at the threshold, as i came in to land in a PA28, there was a strong wind blowing in the direction from the Apache's towards my landing point, and i experienced turbulence and windshear. I'm not sure if this would be due to the Apaches, or just the strong wind conditions, any thoughts would be greatly appreciated.

Difficult to say as we we were not there. Some considerations, helicopters produce a down wash even at flat pitch, sufficient if you're on wheels to initiate and sustain taxi, the Apache manual suggests only pulling power to taxi if use of the rotor disc is insufficient. The very presence of an obstacle upwind is going to cause turbulence, more so if it is a helicopter modifying the airflow with its input via down wash. I don't think some here appreciate the handling qualities of light fixed wing aircraft such as your Cherokee. Congratulations on the airmanship in considering the issue, exercise extreme caution when helicopters are in the vicinity of your fixed wing landing or take off area.
IMHO, best case would have the 2 Apaches at flat pitch creating some possible turbulence in the immediate area downwind of them. Worst case, with the Apaches holding near taxi power (20-24% Q as recommended by the RFM), they would be producing ~16 mph of turbulent wind (see analysis below). Ultimately, it�s always left to the PIC to accept or decline a clearance.
Assume 75% power to hover and using 24% for taxi = ~1/3 of hover thrust. Assuming a GWt of 15000, means each Apache would create about 4950 lbs. of thrust. Therefore, the downwash velocity (at the disc) is SQRT((GWt)/(DA*2*rho)), or SQRT(4950/1809*2*0.002378), at SL. So, each Apache is making 24 f/s, or 16mph of wind.
Assume 75% power to hover and using 24% for taxi = ~1/3 of hover thrust. Assuming a GWt of 15000, means each Apache would create about 4950 lbs. of thrust. Therefore, the downwash velocity (at the disc) is SQRT((GWt)/(DA*2*rho)), or SQRT(4950/1809*2*0.002378), at SL. So, each Apache is making 24 f/s, or 16mph of wind.
Just asking (I really don't know): there is a linear relation between torque and thrust? Beside the direct physics and math involved, one idea occured to me: some torque is used to drive the powertrain and as it is increased part of this extra torque is used to drive the TR, so things seems to be a little more complex.
Just asking (I really don't know): there is a linear relation between torque and thrust? Beside the direct physics and math involved, one idea occured to me: some torque is used to drive the powertrain and as it is increased part of this extra torque is used to drive the TR, so things seems to be a little more complex.
I've understood your simplifications, but my lack of knowledge is on the linearity of the torque/thrust relation from 15% to 75% Q. Also, at any torque from 15% (operational NR, I don't know if the Apache works at 100, 105, 107%...) the torque required to drive the MGB and accessories (assuming constant generators loads etc) is the same, but the torque used to drive the TR increases (and again I don't know the relation between them).
I've understood your simplifications, but my lack of knowledge is on the linearity of the torque/thrust relation from 15% to 75% Q. Also, at any torque from 15% (operational NR, I don't know if the Apache works at 100, 105, 107%...) the torque required to drive the MGB and accessories (assuming constant generators loads etc) is the same, but the torque used to drive the TR increases (and again I don't know the relation between them).
Consulting a graphic (Indicated Torque Required to Hover IGE, 105%NR, AC Off, Wh = 10ft and AI Off) on a RFM, 500ft AD and Aircraft Gross Wheight of 17,000lb and 26,000lb, I found 50%Q and 80%Q, respectively. If the relation is linear, in this helicopter at these conditions, 30%Q correspond to 9,000lbs of thrust, or 1%Q to 300lb.
So, 17,000lb should require 56%Q, and we didn't consider the torque needed to drive the powertrain...
So, 17,000lb should require 56%Q, and we didn't consider the torque needed to drive the powertrain...
Tosh. Always pull power to ground taxi, I say again about 10% Tq above MPOG. If you don’t, you cause stress on the strap packs.
8.25 TAXI
CAUTION
• Excessive cyclic displacement with low power settings will result in droop stop pounding.
• If forward cyclic inputs appear excessive while taxiing, increase collective as necessary. Appropriate collective setting is a function of cyclic displacement and surface conditions.
• Excessive forward cyclic displacement with low power settings will result in high strap pack loads.
Consulting a graphic (Indicated Torque Required to Hover IGE, 105%NR, AC Off, Wh = 10ft and AI Off) on a RFM, 500ft AD and Aircraft Gross Wheight of 17,000lb and 26,000lb, I found 50%Q and 80%Q, respectively. If the relation is linear, in this helicopter at these conditions, 30%Q correspond to 9,000lbs of thrust, or 1%Q to 300lb.
So, 17,000lb should require 56%Q, and we didn't consider the torque needed to drive the powertrain...
So, 17,000lb should require 56%Q, and we didn't consider the torque needed to drive the powertrain...
On a thread about LTE a long time ago, the discussion about the relation between loss of NR (due overpitching) and torque increase (added to the loss of NR on the TR) emerged and someone, I think Nick Lappos, explained why it occurs.
So, you applied a linear relation between torque and thrust on your calculations and my question was why it is linear.
Reviewing you post and trying to understand, another question arised: if the helicopter is on ground, the amount of thrust generated by the MR shouldn't be related just to the power/pitch/torque (collective position...) applied instead of torque and takeoff weight? If the helicopter isn't in the air and the torque setting is well below the required for hover, why the weight on wheels should matter to determine the thrust being produced?
Having re-read the OP, memories of px states that the Apaches were holding at the threshold - did he mean near the threshold, because the distance from the landing area to the holding point would be significant in determining any turbulence downwind of the helicopters.
However, I remain pretty convinced that the wind-shear and turbulence experienced by memories of px is far more likely to be caused by normal wind gusts - he noted that there was a strong wind and such gusts and lulls are commonplace in those conditions.
However, I remain pretty convinced that the wind-shear and turbulence experienced by memories of px is far more likely to be caused by normal wind gusts - he noted that there was a strong wind and such gusts and lulls are commonplace in those conditions.
Jimmy - the faster you spin the TR, the less the Tq required so if the Nr reduces, the Tq increases.
At MPOG (min pitch on the ground) there will be very little thrust produced by the MR.
At MPOG (min pitch on the ground) there will be very little thrust produced by the MR.
On a thread about LTE a long time ago, the discussion about the relation between loss of NR (due overpitching) and torque increase (added to the loss of NR on the TR) emerged and someone, I think Nick Lappos, explained why it occurs.
Reviewing you post and trying to understand, another question arised: if the helicopter is on ground, the amount of thrust generated by the MR shouldn't be related just to the power/pitch/torque (collective position...) applied instead of torque and takeoff weight?
Crab and 212, we are on the same page, thanks. I brought the Torque/NR example because it was new to me at that time and was explained in few lines, as you did above.
Any light on the Torque/Thrust relation?
Any light on the Torque/Thrust relation?
Jim, I'm not challenging you. I clearly don't have your background, but your post made me curious about something new to me, and asked for a short explanation. Also, as a non native English speaker, maybe "linear" could be well replaced by "direct" on my question.
But, as PPRuNe isn't a classroom, you don't have the obligation to explain until I understand.
Thanks anyway.
But, as PPRuNe isn't a classroom, you don't have the obligation to explain until I understand.
Thanks anyway.
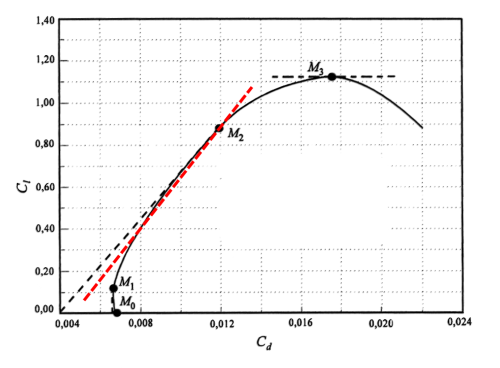
Jimmy - my take on it is that since the coefficients of both lift and drag - shown on the axes of Jim Elis graph - change with AoA, and since the V squared doesn't change lifting to the hover, then thrust will increase as CL increases and Tq will increase to over come the rise in CD.
Originally Posted by [email protected]
Jimmy - my take on it is that since the coefficients of both lift and drag - shown on the axes of Jim Elis graph - change with AoA, and since the V squared doesn't change lifting to the hover, then thrust will increase as CL increases and Tq will increase to over come the rise in CD.
