


Helicopter down outside Leicester City Football Club

WuW - chopjock has a reputation for asking 'interesting' questions on this forum - he is a helicopter pilot so I assume some level of technical knowledge, like how a servo works.
I saw a picture today of a duplex bearing from another helicopter TR pitch change mechanism where the inner race and the ball bearings had separated longitudinally from the outer race which is an interference fit within the housing - manufacturing fault??????
I saw a picture today of a duplex bearing from another helicopter TR pitch change mechanism where the inner race and the ball bearings had separated longitudinally from the outer race which is an interference fit within the housing - manufacturing fault??????

Pozidrive - The control rod is a hydraulic piston with attachments as hoistop and nodrama say.
The input arm acts on the servo pilot valve to direct hyd fluid to one side or other of that piston, thus moving the control rod in and out.
The reason for having the other end of the input arm connected to the control rod is to provide the follow-up action and recentralise the servo valve when the TR pitch has been driven to the required position.
The input arm acts on the servo pilot valve to direct hyd fluid to one side or other of that piston, thus moving the control rod in and out.
The reason for having the other end of the input arm connected to the control rod is to provide the follow-up action and recentralise the servo valve when the TR pitch has been driven to the required position.
Join Date: Mar 2008
Location: England... what's left of it...
Posts: 161
Likes: 0
Received 0 Likes
on
0 Posts
Originally Posted by [email protected]
I saw a picture today of a duplex bearing from another helicopter TR pitch change mechanism where the inner race and the ball bearings had separated longitudinally from the outer race which is an interference fit within the housing - manufacturing fault??????
One thing that I note is that this type of duplex bearing might not be suitable to this application. Obviously, failure of the bearing in this installation can lead to loss of the aircraft. The predicted life / failure rate of the bearing might appear very good but, is it satisfactory in such a critical component? Packed and sealed bearings will fail when the lubricant leaks out and / or water or other contamination gets in. The internal structure of the bearing may also promote early failure if the grease fill from both of the races can all leak out or, if the contamination or debris can migrate internally from one race to the other. This accident bearing is described as packed with debris and, in general terms, this is an issue with sealed lubrication. A similar bearing with oil circulation lubrication may avoid debris packing and, any debris particles from a failing bearing may be detected early with monitoring of the lubricating oil.
OAP
OAP
Further to some questions about the "significantly greater torque" to remove the nut. jimjim1 showed a nice close-up in his post #979. I believe that the carbonised remains of leaked lubricant or other contamination can be seen burnt into the threads of the shaft.
OAP
OAP
Join Date: Mar 2008
Location: England... what's left of it...
Posts: 161
Likes: 0
Received 0 Likes
on
0 Posts
It might be that what is described as "Debris" within the bearing is actually the debris of lubricant and bearing components, following overheating and being carbonized due to seizure. The description so far has not been as precise as it might be.
Originally Posted by [email protected]
WuW - chopjock has a reputation for asking 'interesting' questions on this forum - he is a helicopter pilot so I assume some level of technical knowledge, like how a servo works.
I saw a picture today of a duplex bearing from another helicopter TR pitch change mechanism where the inner race and the ball bearings had separated longitudinally from the outer race which is an interference fit within the housing - manufacturing fault??????
I saw a picture today of a duplex bearing from another helicopter TR pitch change mechanism where the inner race and the ball bearings had separated longitudinally from the outer race which is an interference fit within the housing - manufacturing fault??????
What I'm not clear about is the exact layout of the two bearings that make up the 'duplex' bearing.
It seems the outer (nearest the spider) bearing is a roller bearing that takes the axial loads between the driving outer shaft that is spinning the TR and the inner control rod.
Is the inner (furthest from the spider) bearing attached by its inner race to the control rod and allowed to move linearly within the driving shaft or is it also an interference fit with the driving shaft but allows the control rod to pass through its inner race and move linearly that way?
It seems the outer (nearest the spider) bearing is a roller bearing that takes the axial loads between the driving outer shaft that is spinning the TR and the inner control rod.
Is the inner (furthest from the spider) bearing attached by its inner race to the control rod and allowed to move linearly within the driving shaft or is it also an interference fit with the driving shaft but allows the control rod to pass through its inner race and move linearly that way?
Avoid imitations
Join Date: Nov 2000
Location: Wandering the FIR and cyberspace often at highly unsociable times
Posts: 14,573
Received 419 Likes
on
221 Posts
It would be interesting to know the maintenance requirements for and intended service life of the duplex bearing. From what I've discovered already by asking around the bazaars, I understand there is no provision for re-greasing the bearing once installed.
Originally Posted by [email protected]
Pozidrive - The control rod is a hydraulic piston with attachments as hoistop and nodrama say.
The input arm acts on the servo pilot valve to direct hyd fluid to one side or other of that piston, thus moving the control rod in and out.
The reason for having the other end of the input arm connected to the control rod is to provide the follow-up action and recentralise the servo valve when the TR pitch has been driven to the required position.
The input arm acts on the servo pilot valve to direct hyd fluid to one side or other of that piston, thus moving the control rod in and out.
The reason for having the other end of the input arm connected to the control rod is to provide the follow-up action and recentralise the servo valve when the TR pitch has been driven to the required position.
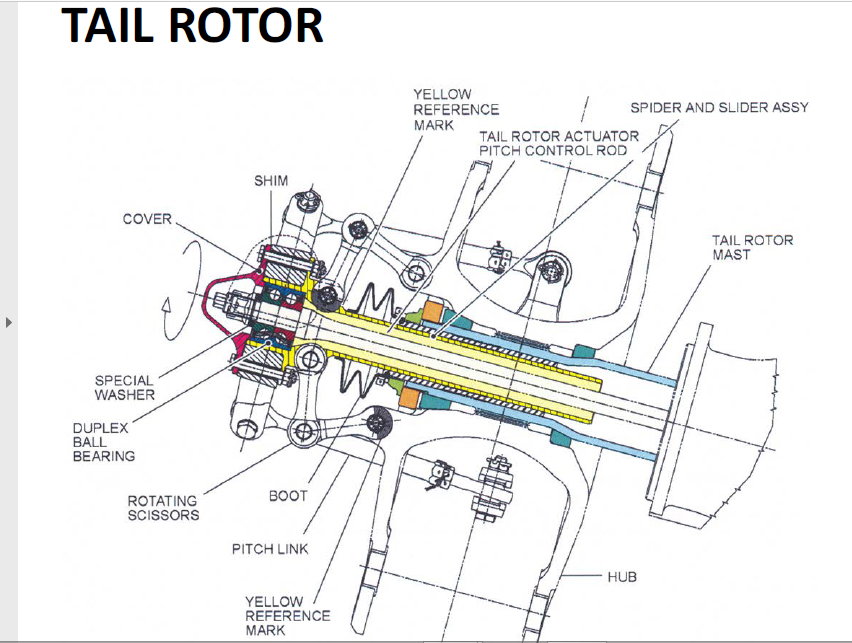
Having looked closer at my 139 tech notes - the duplex bearing can be clearly seen - what isn't so obvious is the slider assembly (to which the spider is attached) is splined into the TR drive shaft so the whole assembly slides in and out on the splines whilst being supported at the outboard end by the duplex bearing.
I am assuming that the 169 has a very similar setup.
The text talks about the outboard nut and washer setting the preload for the outer race and the stepped end of the control rod providing the preload for the inner race - if the preloads are too high, can that damage the bearing?
can it damage the bearing?
of course, duplex bearings by design are meant for axial load capabilities as well as rigidity.
if it's not preloaded right, you lose that. The bearing could move some, there would be obvious friction issues and subsequent grease breakdown and or loss.
of course, duplex bearings by design are meant for axial load capabilities as well as rigidity.
if it's not preloaded right, you lose that. The bearing could move some, there would be obvious friction issues and subsequent grease breakdown and or loss.
Avoid imitations
Join Date: Nov 2000
Location: Wandering the FIR and cyberspace often at highly unsociable times
Posts: 14,573
Received 419 Likes
on
221 Posts
Crab, your diagram helps clarify something for me. I know it's from a 139 but I believe the design principle to be similar to a 169 (although the pin carrier at the control end is different).
If the duplex bearing seizes and the outer race spins in its housing, rather than the inner one (the latter being pre-loaded against the stepped end of the control shaft), there would be no dragging force tending to undo the nut. Is the outer race pre-loaded in it's housing by torquing up the screws on the outer, dome shaped cover?
If the duplex bearing seizes and the outer race spins in its housing, rather than the inner one (the latter being pre-loaded against the stepped end of the control shaft), there would be no dragging force tending to undo the nut. Is the outer race pre-loaded in it's housing by torquing up the screws on the outer, dome shaped cover?

No drama - sorry, I realise I typed roller when I meant ball - I was very clear they were both ball bearing races in the duplex setup but my fingers didn't seem to notice
Avoid imitations
Join Date: Nov 2000
Location: Wandering the FIR and cyberspace often at highly unsociable times
Posts: 14,573
Received 419 Likes
on
221 Posts
Duplex bearings, such as those in the diagram give the same support in both directions.
If the duplex bearing seizes and the outer race spins in its housing, rather than the inner one (the latter being pre-loaded against the stepped end of the control shaft), there would be no dragging force tending to undo the nut. Is the outer race pre-loaded in it's housing by torquing up the screws on the outer, dome shaped cover?
I am reliably informed by my engineers that the bearings are interference fit and have to be cooled with liquid nitrogen for installation so that they expand in place once fitted so the outer race rotating shouldn't be possible.
Avoid imitations
Join Date: Nov 2000
Location: Wandering the FIR and cyberspace often at highly unsociable times
Posts: 14,573
Received 419 Likes
on
221 Posts
Shy, yes according to my tech notes.
I am reliably informed by my engineers that the bearings are interference fit and have to be cooled with liquid nitrogen for installation so that they expand in place once fitted so the outer race rotating shouldn't be possible.
I am reliably informed by my engineers that the bearings are interference fit and have to be cooled with liquid nitrogen for installation so that they expand in place once fitted so the outer race rotating shouldn't be possible.