


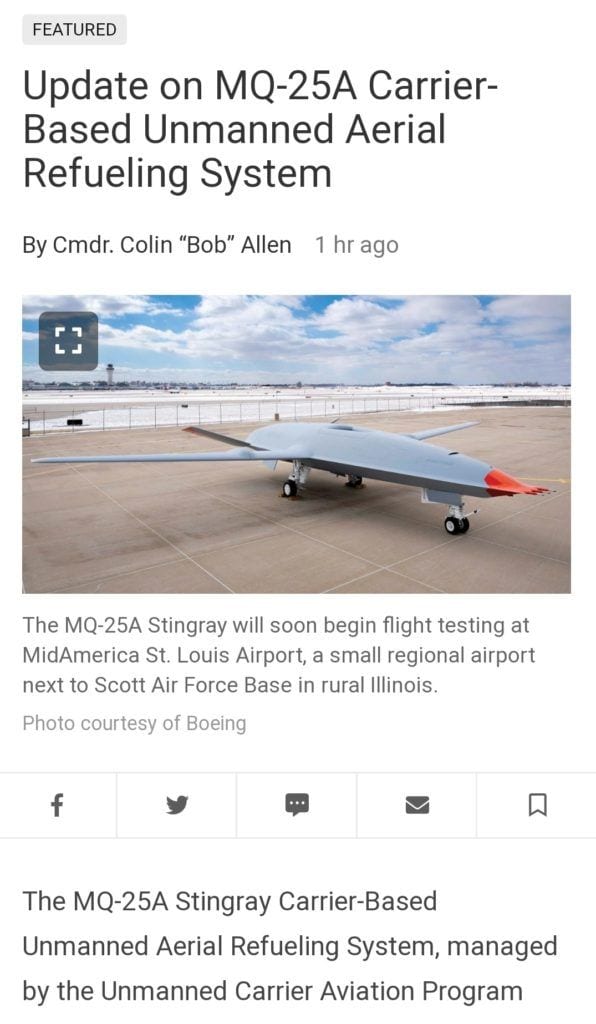
US Navy Drone Tanker

Ken, not accusing you of being a spiv, sorry if it came across that way. I was just pointing out that apart from those prop jobs over 80 years ago, Boeing has effectively not designed or built anything that has gone onto a carrier deck until this drone thing. No company with any common decency would claim that the A4, F4, F18 (and others like the F15, C-17) are "Boeings". I walk the halls of a Boeing sim centre and it just is so corny seeing posters of all these aeroplanes over the decades built by others but now claimed to be "Boeings". It really does demean the company, in my eyes.

Join Date: Aug 2014
Location: New Braunfels, TX
Age: 70
Posts: 1,954
Likes: 0
Received 0 Likes
on
0 Posts
...No company with any common decency would claim that the A4, F4, F18 (and others like the F15, C-17) are "Boeings". I walk the halls of a Boeing sim centre and it just is so corny seeing posters of all these aeroplanes over the decades built by others but now claimed to be "Boeings". It really does demean the company, in my eyes.
Last edited by KenV; 2nd May 2019 at 14:55.
Join Date: Aug 2014
Location: New Braunfels, TX
Age: 70
Posts: 1,954
Likes: 0
Received 0 Likes
on
0 Posts
From Wiki:
The Navy's goal for the aircraft is to be able to deliver 15,000 lb (6,800 kg) of fuel total to 4 to 6 airplanes at a range of 500 nmi (580 mi; 930 km).
Don't know if the delivered product meets or exceeds the above.
The Navy's goal for the aircraft is to be able to deliver 15,000 lb (6,800 kg) of fuel total to 4 to 6 airplanes at a range of 500 nmi (580 mi; 930 km).
Don't know if the delivered product meets or exceeds the above.
Ecce Homo! Loquitur...
Alert 5 � USN?s update on MQ-25A program - Military Aviation News
USN�s update on MQ-25A program
The U.S. Navy published an update on the MQ-25A program on its Tester newsletter a few hours ago but the page is now offline. We managed to download screenshots of the article before the link went dead.
According to the article, second round testing of the Unmanned Carrier Aircraft (UCA) Mission Control Station (UMCS) �is planned for late fiscal year 2019 where the control station will be connected to Space and Naval Warfare Systems Command labs around the country to test the UMCS interaction with the networks necessary to control the MQ-25A wherever it may operate.�
The prototype is still on schedule to make its maiden flight this year and will reach VX-23 �in late 2021 to support an aggressive three-year test program to enable a 2024 Initial Operating Capability.�
USN�s update on MQ-25A program
The U.S. Navy published an update on the MQ-25A program on its Tester newsletter a few hours ago but the page is now offline. We managed to download screenshots of the article before the link went dead.
According to the article, second round testing of the Unmanned Carrier Aircraft (UCA) Mission Control Station (UMCS) �is planned for late fiscal year 2019 where the control station will be connected to Space and Naval Warfare Systems Command labs around the country to test the UMCS interaction with the networks necessary to control the MQ-25A wherever it may operate.�
The prototype is still on schedule to make its maiden flight this year and will reach VX-23 �in late 2021 to support an aggressive three-year test program to enable a 2024 Initial Operating Capability.�

Join Date: Dec 2006
Location: UK
Posts: 799
Likes: 0
Received 0 Likes
on
0 Posts
dctPub,
You said that: "There is no difference to the UAV whether it has to land on a carrier deck or wide runway. Also flying a racetrack pattern doesn't seem particularly difficult and all aircraft flying today can do it. Not saying you are wrong about the unmanned bit but it's just odd that you decided to qualify the refuelling and landing on carrier as a technological breakthrough in unmanned flying'.
I might be able to help a little here, as I have some experience in development of aircraft for carrier ops.
There are very substantial difference between the way that air vehicles land on a land runway and the way they land on a carrier deck for an arrested landing. They need to carry out a carrier approach and landing at lower speeds (to stay within the limits of the carrier arresting gear and the deck area available to stop). They also need to arrive at the deck in a precise manner so as to reliably and repeatably engage the arresting wires. These drive specific aircraft design characteristics, of which a few are:
So yes, I'd characterise getting a large UAV on to and off a carrier flight deck safely and reliably (which they haven't quite done yet, but seem to be moving well towards) is a bit of a breakthrough. You might differ, and that's fine - this is a discussion forum. Anyway, I hope this helps.
Best regards as ever to all those doing the hard work in the real world,
Engines
You said that: "There is no difference to the UAV whether it has to land on a carrier deck or wide runway. Also flying a racetrack pattern doesn't seem particularly difficult and all aircraft flying today can do it. Not saying you are wrong about the unmanned bit but it's just odd that you decided to qualify the refuelling and landing on carrier as a technological breakthrough in unmanned flying'.
I might be able to help a little here, as I have some experience in development of aircraft for carrier ops.
There are very substantial difference between the way that air vehicles land on a land runway and the way they land on a carrier deck for an arrested landing. They need to carry out a carrier approach and landing at lower speeds (to stay within the limits of the carrier arresting gear and the deck area available to stop). They also need to arrive at the deck in a precise manner so as to reliably and repeatably engage the arresting wires. These drive specific aircraft design characteristics, of which a few are:
- Larger wings and flaps to deliver lower approach speed
- Larger physical control surfaces and highly responsive engines to deliver the very precise control required or approach and landing (note that the physical separation between the landing aircraft and parked aircraft is far less than on a land base)
- Advanced flying control systems to drive the control surfaces
- Much tougher (and larger and heavier) landing gear systems to handle the 'no flare' landings used. (let me stress this - carrier aircraft don't 'flare' before landing - they carry on down the glide slope all the way to the deck. Normal carrier landing vertical speeds will equate to 'crash case' for a land based aircraft.
- Specific design requirements to ensure stable behaviour during and after high speed engagement withe the arresting wires.
- Much tougher internal structure and systems to handle the higher loads and accelerations experienced during carrier landings.
So yes, I'd characterise getting a large UAV on to and off a carrier flight deck safely and reliably (which they haven't quite done yet, but seem to be moving well towards) is a bit of a breakthrough. You might differ, and that's fine - this is a discussion forum. Anyway, I hope this helps.
Best regards as ever to all those doing the hard work in the real world,
Engines
Join Date: Feb 2006
Location: Hanging off the end of a thread
Posts: 32,892
Received 2,830 Likes
on
1,208 Posts
Apparently the first UAV crews are going through the MQ-25A Stingray deck proficiency training now, a Captain Troy Tempest and his Nav/Weapons Operator Lieutenant George Lee Sheridan, callsign "Phones."
Join Date: Dec 2006
Location: UK
Posts: 799
Likes: 0
Received 0 Likes
on
0 Posts
unmanned_droid,
Thanks for coming back. Yes, I was aware of the X-47B stuff back in 2013. I apologise if I gave the impression that the team hadn't demonstrated launch and recoveries from the deck - but there is a big difference between doing this with an 'X plane' (which is basically a flying shape) under experimental test conditions (which is what they did in 2013) and getting an operationally effective aircraft (at representative weights) to carry out launch and recovery enough times under all the various conditions to be able to say that it's a sufficiently safe and reliable evolution that the USN can incorporate into their operational plans.
The fact that it's taken this long indicates (at least in my view) how hard it has been for the team to 'cross the t's and dot the i's'. By the way, this shouldn't be taken as any form of criticism. Getting from initial demonstrations to operational clearance is a long and tough process, and the team behind the MQ-25 deserve to be congratulated.
My main point was to try to explain why landing a UAV on a carrier is not at all like landing on a land runway. Again, my apologies if I didn't make that clear.
Best Regards as ever to all those dotting the i's and crossing the t's,
Engines
Thanks for coming back. Yes, I was aware of the X-47B stuff back in 2013. I apologise if I gave the impression that the team hadn't demonstrated launch and recoveries from the deck - but there is a big difference between doing this with an 'X plane' (which is basically a flying shape) under experimental test conditions (which is what they did in 2013) and getting an operationally effective aircraft (at representative weights) to carry out launch and recovery enough times under all the various conditions to be able to say that it's a sufficiently safe and reliable evolution that the USN can incorporate into their operational plans.
The fact that it's taken this long indicates (at least in my view) how hard it has been for the team to 'cross the t's and dot the i's'. By the way, this shouldn't be taken as any form of criticism. Getting from initial demonstrations to operational clearance is a long and tough process, and the team behind the MQ-25 deserve to be congratulated.
My main point was to try to explain why landing a UAV on a carrier is not at all like landing on a land runway. Again, my apologies if I didn't make that clear.
Best Regards as ever to all those dotting the i's and crossing the t's,
Engines
Join Date: Feb 2006
Location: Hanging off the end of a thread
Posts: 32,892
Received 2,830 Likes
on
1,208 Posts
I take it this thing is flown by a crew onto the ships from some control station? Where are the crews, onboard ship? I ask because in rough seas it must be interesting as you will I take it be flying a visual approach to a ship while your body is sensing the roll and pitch not of the aircraft, but that of the ship.
if it is auto land I wonder how the system copes with the sudden and variable altitude change as it passes over the end of the ship.
if it is auto land I wonder how the system copes with the sudden and variable altitude change as it passes over the end of the ship.
Last edited by NutLoose; 30th Aug 2019 at 21:52.
I take it this thing is flown by a crew onto the ships from some control station? Where are the crews, onboard ship? I ask because in rough seas it must be interesting as you will I take it be flying a visual approach to a ship while your body is sensing the roll and pitch not of the aircraft, but that of the ship.
if it is auto land I wonder how the system copes with the sudden and variable altitude change as it passes over the end of the ship.
if it is auto land I wonder how the system copes with the sudden and variable altitude change as it passes over the end of the ship.
I think the approach and landing is automatic. I.e. no person in the loop, except maybe a LSO type has a go-around switch.
To add, there is an operational carrier auto-land system in use (Super Hornets).
unmanned_droid,
Thanks for coming back. Yes, I was aware of the X-47B stuff back in 2013. I apologise if I gave the impression that the team hadn't demonstrated launch and recoveries from the deck - but there is a big difference between doing this with an 'X plane' (which is basically a flying shape) under experimental test conditions (which is what they did in 2013) and getting an operationally effective aircraft (at representative weights) to carry out launch and recovery enough times under all the various conditions to be able to say that it's a sufficiently safe and reliable evolution that the USN can incorporate into their operational plans.
The fact that it's taken this long indicates (at least in my view) how hard it has been for the team to 'cross the t's and dot the i's'. By the way, this shouldn't be taken as any form of criticism. Getting from initial demonstrations to operational clearance is a long and tough process, and the team behind the MQ-25 deserve to be congratulated.
My main point was to try to explain why landing a UAV on a carrier is not at all like landing on a land runway. Again, my apologies if I didn't make that clear.
Best Regards as ever to all those dotting the i's and crossing the t's,
Engines
Thanks for coming back. Yes, I was aware of the X-47B stuff back in 2013. I apologise if I gave the impression that the team hadn't demonstrated launch and recoveries from the deck - but there is a big difference between doing this with an 'X plane' (which is basically a flying shape) under experimental test conditions (which is what they did in 2013) and getting an operationally effective aircraft (at representative weights) to carry out launch and recovery enough times under all the various conditions to be able to say that it's a sufficiently safe and reliable evolution that the USN can incorporate into their operational plans.
The fact that it's taken this long indicates (at least in my view) how hard it has been for the team to 'cross the t's and dot the i's'. By the way, this shouldn't be taken as any form of criticism. Getting from initial demonstrations to operational clearance is a long and tough process, and the team behind the MQ-25 deserve to be congratulated.
My main point was to try to explain why landing a UAV on a carrier is not at all like landing on a land runway. Again, my apologies if I didn't make that clear.
Best Regards as ever to all those dotting the i's and crossing the t's,
Engines
Since the X-47B was an NG product, I imagine the cross fertilisation in the airframe and systems is limited to mostly people job swapping besides specifications laid out in the tender. Of course, much learning will have been captured by the operator during trials which will be being applied here, as I'm sure you know.
Always enjoy your posts.
UD
Join Date: Dec 2006
Location: UK
Posts: 799
Likes: 0
Received 0 Likes
on
0 Posts
Unmanned,
Thanks for coming back. Disagreements are excellent, as they promote discussion, and I do think that the MQ-25 team are nearly there. As a somewhat gnarly old engineer, I just know that the last 5% of any programme can be a real bear to close out. The DoD OT&E report will be the key document. Again, BZ to the MQ-25 team for what they've already achieved.
I would gently argue that the X-47B was pretty much a flying shape, and I'd expect that there has been very substantial redesign of the internal structure and systems to get to the MQ-25. But that doesn't diminish the value of an 'X' programme at all. In my experience, in the US 'X' means 'X'.
Nutloose raised a very good point about the sudden change in altitude as the air vehicle passes over the end of the ship. I'd suspect that the answer is that the landing guidance system (very probably JPALS) is using the flight deck at the point of engaging the wires as the reference 'zero altitude' for the approach, and not the sea. Anyone out there with better knowledge?
Best regards as ever to those clever Navair engineers at Pax River,
Engines
Thanks for coming back. Disagreements are excellent, as they promote discussion, and I do think that the MQ-25 team are nearly there. As a somewhat gnarly old engineer, I just know that the last 5% of any programme can be a real bear to close out. The DoD OT&E report will be the key document. Again, BZ to the MQ-25 team for what they've already achieved.
I would gently argue that the X-47B was pretty much a flying shape, and I'd expect that there has been very substantial redesign of the internal structure and systems to get to the MQ-25. But that doesn't diminish the value of an 'X' programme at all. In my experience, in the US 'X' means 'X'.
Nutloose raised a very good point about the sudden change in altitude as the air vehicle passes over the end of the ship. I'd suspect that the answer is that the landing guidance system (very probably JPALS) is using the flight deck at the point of engaging the wires as the reference 'zero altitude' for the approach, and not the sea. Anyone out there with better knowledge?
Best regards as ever to those clever Navair engineers at Pax River,
Engines
Well, the MQ25 is an entirely different product to the X-47B so, yes, I imagine there is quite a lot of design differences! 
Googling JPALS gives the following slides:
PMA-213 JPALS | HTii
"While JPALS provides enhanced capability to existing aircraft, it is a critical component of the JSF�s all-weather capability and the only currently envisioned way to operate large unmanned aircraft from ships at sea."
EMALS & JPALS for the JSF - General F-35 Forum
End of page 2 has a slide with JPALS 'success' condition
That success box will probably be moving with the ship rotations so the course correction is continually recalculated.
Googling JPALS gives the following slides:
PMA-213 JPALS | HTii
"While JPALS provides enhanced capability to existing aircraft, it is a critical component of the JSF�s all-weather capability and the only currently envisioned way to operate large unmanned aircraft from ships at sea."
EMALS & JPALS for the JSF - General F-35 Forum
End of page 2 has a slide with JPALS 'success' condition
That success box will probably be moving with the ship rotations so the course correction is continually recalculated.
Surely no-one is going to risk AAR returning to the ship without any diversions, so I suppose this drone will be used to refuel missions outbound to the target.
15000 / 4 = 3750lb each. At 8lb / imp. gallon, that makes 469 imp gallon each - about the same as 2 x 230 gallon Hunter drop tanks....
Surely no-one is going to risk AAR returning to the ship without any diversions, so I suppose this drone will be used to refuel missions outbound to the target.
Surely no-one is going to risk AAR returning to the ship without any diversions, so I suppose this drone will be used to refuel missions outbound to the target.
https://www.navy.mil/submit/display.asp?story_id=56787
Pardon my ignorance, but isn't stealth technology intended to conceal your airframe/asset from detection?
So how is the refuelling aircraft going to locate the tanker, without giving away both aircraft?
So how is the refuelling aircraft going to locate the tanker, without giving away both aircraft?
Ecce Homo! Loquitur...
Appearances to the contrary, the MQ-25 is not stealthy and it was not a requirement. Check out the planform, and the refuelling pods, once fitted, will increase it substantially.

Presumably that image shows 2 x AAR pods for system redundancy reasons? Because with such a small wingspan, there's no way that the drone can refuel 2 fighters simultaneously....
Starboard wing is a fuel tank - no RAT, different shape.
The position of the intake and the low angle of the stabilisers indicates radar cross section at least at one point was a design driver.
The position of the intake and the low angle of the stabilisers indicates radar cross section at least at one point was a design driver.