


TR malfunctions for beginners - a refresher lesson!

Thread Starter
Tail rotor malfunctions for beginners
Having talked offline to a number of contributors, the general consensus is that an attempt should be made to simplify the dynamics associated with tail rotor problems – the pilots nemesis.
I'm applying the mnemonic: KISS.[Keep it simple stupid!] on purpose so that all helicopter pilots might understand or relate to it.
There are aerodynamicists, test pilots, victims, individuals out there who know much much more than I and it is hoped they will contribute too. All I ask is that they remember the golden rule throughout: KISS. This is not meant to be a technical blow by blow description of vectors and forces. It is meant to shed some light on a poorly understood malfunction(s).
My main reference is the comprehensive CAA report:
http://www.caa.co.uk/docs/33/capap2003_01.pdf
It discusses many aspects on this subject. Some are fascinating, some are complex...all are thought provoking. Aviators can never stop learning and if it helps one guy out on the day of the race....job done.
Warning: This is not, in any way to be seen as subject matter expert advice. It is background chatter; something to bolster your confidence if and when the day comes. Enjoy.
I invite as many people out there to spread the word and accept the following:
Tail Rotor Failure [TRF]: Mechanical failure resulting in the TR ceasing to act as an anti torque device, either by stopping rotating or breaking up or by departing flight.
Tail Rotor Control Failure [TRCF]: Mechanically sound, still rotating, restricted movement.
TRF:
Catastrophic TRF: If the tail gearbox departs flight, the associated change of CofG will almost certainly cause the aircraft to pitch out of control due to the (weight x moment arm) change caused by the removal of “x” Kg of metal at the end of that moment arm. ENDEX.....
Contained TRF: If the tail rotor stops rotating due to bearing failure; gearbox seizure, drive shaft failure or (closest to my heart): thomas coupling failure! Its raison d'etre ceases.
In the hover: A/c will yaw and pitch immediately and uncontrollably. Time permitting, chop the throttle(s) to reduce (not stop) the yaw. LAND ASAP. Hope for a safe touchdown. Another reason why you should not hover too high. ENDEX......
In flight: There will be an undemanded yaw and pitch input
TRF's will result in the a/c yawing in the opposite direction to the rotation of the blades.
(Whereas an engine failure causes a yaw in the same direction of rotation).
More often than not, a TRF in the cruise where the tail rotor is still attached to the airframe, will result in some form of controlled landing (as opposed to a crash). Invariably a running landing or an EOL. The controlling factors for a successful landing (for the pax not necessarily the a/c) are:
Height at which failure manifested itself.
PRT (pilot reaction time).
Level of experience of the flying pilot.
Training.
Speed of a/c.
Stiffness of airframe (weathercocking ability).
(To name but a few.)
Height: The higher you are in normal flight, the longer you have of regaining control.
PRT: The average PRT is estimated at 2 seconds for most instances. Any longer and the a/c could exceed airframe stress limits and in flight break up could occur.
Experienced pilot: Speaks for itself – they have trained and practiced for these occasions so some of it shouldn't come as a surprise. They are therefore less likely to 'overload'.
Speed of a/c: The faster you are travelling the more likely the a/c will remain cocked in the direction of travel. Atleast the yaw disturbance would be minimised.
Stiffness: Some a/c are more benign to TRF transgressions [Dauphin / EC135 / Squirrel etc]. Others may not be so forgiving [R22, Alouette etc]. The stiffer a/c will reduce the amount of yaw, making it more likely to prolong fwd controllable flight in an attempt to reach a LZ.
These factors combined will decide the eventual outcome: auto / EOL / running landing. The general 'expert' advice gleaned from actual and simulated experiences, suggests that a TRF in fwd flight and at height should be concluded with an EOL with the minimum of delay. This - because you are purposely putting the a/c into a known, tried and tested flight regime (auto) which also reduces the offset of yaw and pitch and culminates in a minimal fwd speed landing reducing the chances of high impact trauma. Prolonging flight leading to a resultant running landing could exacerbate the fault, cause unrecoverable departures from flight at height or below a minimum speed or increase the chances of a traumatic ending if speed and/or heading are uncontrolled at touch down.
In summary then it is suggested that a TRF in fwd flight and at sufficient height should be handled thus:
TRF in fwd flight results in uncontrolled yaw in the opposite direction to main rotor rotation.
Playing with the collective results in more yaw (applying collective), or less yaw (lowering collective). Regain some form of fwd controlled flight accepting yaw and or height loss. Continue fwd flight only if absolutely necessary. (IE: flying over hostile terrain).
Turn into wind if possible remembering to turn away from direction of yaw.
Enter auto (yaw reduces), establish auto rotation and consider chopping the throttle(s). Yaw further reduces slightly if the engine is shut down (but on some helos may cause a counter yaw).
Flare (yaw further reduces), level and cushion touchdown by cross controlling for yaw offset and side slip. Always shut the engine down immediately after touchdown as the reducing Nr will cancel out any tendency for the a/c to counter yaw substantially thereafter. Attempt as close as possible a zero fwd speed landing.
--------------------------
TRCF: This is where it gets tricky for the incumbent, because it allows the pilot time to ‘experiment’ and we all know what happens then
The plan therefore is to apply KISS once more. Here goes:
The pitch on the TR blades is controlled (normally) by cables or rods. The pitch changes the amount of anti torque available to offset yaw due to the rotation of the main rotor.
If you RAISE the collective, the helicopter yaws in the OPPOSITE direction of main rotor rotation. And visa verse. When you RAISE the collective, I call the pedal that is pressed to keep the a/c pointing straight: POWER PEDAL. When you lower the collective, you ease off the power pedal to keep the a/c straight..or apply pressure to the other pedal, dependent on helo type.
When the ability to change the TR pitch stops, the a/c will yaw in direct proportion to the amount of collective lever movement and the pilot will not be able to prevent this happening.
Raise the collective without applying power pedal and the a/c yaws in the opposite direction to MR rotation. Lower the collective and the a/c yaws in the same direction as MR rotation.
For me, as I was learning about permutations for power/speed/heading offset/collective position/fiddling with throttle settings (and then changing to a new helicopter where the MR rotation was in the opposite direction! I felt I needed a ‘crutch’ to rely on, that would remain a constant.
Here it is:
The moment I discover I have a possible TRCF, I remember the torque setting it happened at. I remind myself that a millisecond before the a/c became ‘unserviceable’ it was under control and flying in the direction I wanted it to fly in. Therefore if I can get back to that Torque setting prior to touchdown, the a/c will be pointing in the direction I require.
Example 1:
Flying straight and level – everything appears normal. I decide to descend (by lowering the collective) and in so doing, the a/c immediately yaws in the same direction of MR rotation without permission. I raise the collective back to the original torque setting and the a/c resumes ‘normal’ again.
I then commence my procedure for dealing with a TRCF i.a.w. my aircraft manual and my experience (or lack of it). However, when I finally wish to land safely at the end of this procedure, I know that by attaining that original torque setting, the a/c will be under some form of ‘recognisable’ flight regime (ie: straight and level).
In the above instance, the malfunction manifests itself at cruise power (say 50% Tq). I must therefore find a way to reproduce a relatively sustained profile at 50% Tq immediately prior to touchdown to achieve a survivable outcome.
Example 2:
I am in the climb where everything appears normal (70% Tq). As I lower the collective to level off, there is an undemanded yaw in the direction of MR rotation. I have a high power TRCF @ 70%. .
Example 3:
I am in the descent to land (30% Tq). I level off and there is an undemanded yaw in the opposite direction of the MR rotation. I have a low power TRCF @ 30%.
In all of the above examples, provided I can reproduce those ‘safe’ Tq settings (30, 50, 70), I will be in a relatively safe flight configuration. Now all I have to do is reproduce those steady states long enough to land:
Low power TRCF:
Where do I witness low power settings in my helo?
Bottom of a normal approach prior to arresting the descent.
Bottom of an auto prior to levelling.
Or if you look at the “KISS” power required curve below – Vy .
Vy varies for different helos but is around 60-70kts.
https://www.dropbox.com/s/hzt232ckxgb7ieq/Prfig2.gif
So, with a low power TRCF, I would initially endeavour to level off by raising the collective and accept the offset yaw in the opposite direction of MR rotation. I would then fly at Vy (minimising power, thus minimising this offset yaw) to a suitable landing strip. On arrival at the landing strip I would then initiate a SHALLOW descent at 60-70 kts (offset yaw reduces even more because you lowered the lever to descend). Prior to and just above the touchdown point, whilst still at 60-70kts, initiate a very gentle and prolonged nose up attitude (I specifically did not mention the word ‘flare’!). Allow the speed to decrease whilst still maintaining a gentle descent to land.
[*WARNING: If you reduce speed too much, you could end up dropping through your descent angle and have to apply collective to restrain the increasing R.O.D which could lead to uncontrollable yaw in the opposite direction to MR rotation and subsequent loss of control of the helo. In low power TRCF therefore be prepared for a relatively fast (50+kt) running landing].
Speed should now be inside the safety parameters for a running landing and either the skids / wheels can be used to maintain straight as you raise the collective to cushion the remaining touchdown, or if you are able (in a single pilot helo) bring the throttle back commensurate with the rate of change of yaw to remain relatively straight. In a twin pilot a/c the other pilot can play with the throttles at this stage.
[The bottom of this approach requires practice if it is to produce a polished outcome, but in an emergency, an unprepared landing without previous practice should still save your life].
Cruise power TRCF:
In the above low power TRCF scenario, I was trying to mimic the Tq I had when the TRCF manifested itself (30%). On the graph, 30% Tq or SHP relates to a minimum speed of Vy (ish).
This time though, with a cruise power TRCF I am looking to achieve 50%. From the graph it appears that the respective speed for this power is slower than Vy (as I move up the y axis from 30 – 50 Tq). So if I employ the same tactics as in the above scenario, at the bottom of the SHALLOW approach I can afford to slow down even more, prior to touchdown by raising the collective further to try to achieve 50% Tq/SHP. The result being that my touchdown speed is even lower than the previous scenario’s final running landing speed.
High Power TRCF:
The “easiest” outcome of them all. Using the same scenario as both of the above and in the best interests of KISS – I now have to go even further up the y axis to find 70% Tq/SHP. This means that at the bottom of my SHALLOW approach, as I begin my progressive nose up attitude immediately prior to touching down, I can bask in the satisfaction of knowing that the collective will need to be raised significantly as I slow down more, and more and more en route to achieving 70 Tq/SHP. In fact I might even (wind permitting) be able to come to a hover, or a (trickle) fwd drift.
In summary:
TRF: Provided the gearbox assembly remains onboard the probable outcome is a land as soon as possible (LASAP) auto and/or an EOL.
TRCF: Memorise the shape of your helicopters power/drag curve and picture where on the Tq axis your malfunction manifested itself and how you are going to return to that figure immediately prior to touch down. LASAP.
Remember: the more you practice this manoeuvre the more likely you will be able to survive it on the day of the race.
Having talked offline to a number of contributors, the general consensus is that an attempt should be made to simplify the dynamics associated with tail rotor problems – the pilots nemesis.
I'm applying the mnemonic: KISS.[Keep it simple stupid!] on purpose so that all helicopter pilots might understand or relate to it.
There are aerodynamicists, test pilots, victims, individuals out there who know much much more than I and it is hoped they will contribute too. All I ask is that they remember the golden rule throughout: KISS. This is not meant to be a technical blow by blow description of vectors and forces. It is meant to shed some light on a poorly understood malfunction(s).
My main reference is the comprehensive CAA report:
http://www.caa.co.uk/docs/33/capap2003_01.pdf
It discusses many aspects on this subject. Some are fascinating, some are complex...all are thought provoking. Aviators can never stop learning and if it helps one guy out on the day of the race....job done.
Warning: This is not, in any way to be seen as subject matter expert advice. It is background chatter; something to bolster your confidence if and when the day comes. Enjoy.
I invite as many people out there to spread the word and accept the following:
Tail Rotor Failure [TRF]: Mechanical failure resulting in the TR ceasing to act as an anti torque device, either by stopping rotating or breaking up or by departing flight.
Tail Rotor Control Failure [TRCF]: Mechanically sound, still rotating, restricted movement.
TRF:
Catastrophic TRF: If the tail gearbox departs flight, the associated change of CofG will almost certainly cause the aircraft to pitch out of control due to the (weight x moment arm) change caused by the removal of “x” Kg of metal at the end of that moment arm. ENDEX.....
Contained TRF: If the tail rotor stops rotating due to bearing failure; gearbox seizure, drive shaft failure or (closest to my heart): thomas coupling failure! Its raison d'etre ceases.
In the hover: A/c will yaw and pitch immediately and uncontrollably. Time permitting, chop the throttle(s) to reduce (not stop) the yaw. LAND ASAP. Hope for a safe touchdown. Another reason why you should not hover too high. ENDEX......
In flight: There will be an undemanded yaw and pitch input
TRF's will result in the a/c yawing in the opposite direction to the rotation of the blades.
(Whereas an engine failure causes a yaw in the same direction of rotation).
More often than not, a TRF in the cruise where the tail rotor is still attached to the airframe, will result in some form of controlled landing (as opposed to a crash). Invariably a running landing or an EOL. The controlling factors for a successful landing (for the pax not necessarily the a/c) are:
Height at which failure manifested itself.
PRT (pilot reaction time).
Level of experience of the flying pilot.
Training.
Speed of a/c.
Stiffness of airframe (weathercocking ability).
(To name but a few.)
Height: The higher you are in normal flight, the longer you have of regaining control.
PRT: The average PRT is estimated at 2 seconds for most instances. Any longer and the a/c could exceed airframe stress limits and in flight break up could occur.
Experienced pilot: Speaks for itself – they have trained and practiced for these occasions so some of it shouldn't come as a surprise. They are therefore less likely to 'overload'.
Speed of a/c: The faster you are travelling the more likely the a/c will remain cocked in the direction of travel. Atleast the yaw disturbance would be minimised.
Stiffness: Some a/c are more benign to TRF transgressions [Dauphin / EC135 / Squirrel etc]. Others may not be so forgiving [R22, Alouette etc]. The stiffer a/c will reduce the amount of yaw, making it more likely to prolong fwd controllable flight in an attempt to reach a LZ.
These factors combined will decide the eventual outcome: auto / EOL / running landing. The general 'expert' advice gleaned from actual and simulated experiences, suggests that a TRF in fwd flight and at height should be concluded with an EOL with the minimum of delay. This - because you are purposely putting the a/c into a known, tried and tested flight regime (auto) which also reduces the offset of yaw and pitch and culminates in a minimal fwd speed landing reducing the chances of high impact trauma. Prolonging flight leading to a resultant running landing could exacerbate the fault, cause unrecoverable departures from flight at height or below a minimum speed or increase the chances of a traumatic ending if speed and/or heading are uncontrolled at touch down.
In summary then it is suggested that a TRF in fwd flight and at sufficient height should be handled thus:
TRF in fwd flight results in uncontrolled yaw in the opposite direction to main rotor rotation.
Playing with the collective results in more yaw (applying collective), or less yaw (lowering collective). Regain some form of fwd controlled flight accepting yaw and or height loss. Continue fwd flight only if absolutely necessary. (IE: flying over hostile terrain).
Turn into wind if possible remembering to turn away from direction of yaw.
Enter auto (yaw reduces), establish auto rotation and consider chopping the throttle(s). Yaw further reduces slightly if the engine is shut down (but on some helos may cause a counter yaw).
Flare (yaw further reduces), level and cushion touchdown by cross controlling for yaw offset and side slip. Always shut the engine down immediately after touchdown as the reducing Nr will cancel out any tendency for the a/c to counter yaw substantially thereafter. Attempt as close as possible a zero fwd speed landing.
--------------------------
TRCF: This is where it gets tricky for the incumbent, because it allows the pilot time to ‘experiment’ and we all know what happens then
The plan therefore is to apply KISS once more. Here goes:
The pitch on the TR blades is controlled (normally) by cables or rods. The pitch changes the amount of anti torque available to offset yaw due to the rotation of the main rotor.
If you RAISE the collective, the helicopter yaws in the OPPOSITE direction of main rotor rotation. And visa verse. When you RAISE the collective, I call the pedal that is pressed to keep the a/c pointing straight: POWER PEDAL. When you lower the collective, you ease off the power pedal to keep the a/c straight..or apply pressure to the other pedal, dependent on helo type.
When the ability to change the TR pitch stops, the a/c will yaw in direct proportion to the amount of collective lever movement and the pilot will not be able to prevent this happening.
Raise the collective without applying power pedal and the a/c yaws in the opposite direction to MR rotation. Lower the collective and the a/c yaws in the same direction as MR rotation.
For me, as I was learning about permutations for power/speed/heading offset/collective position/fiddling with throttle settings (and then changing to a new helicopter where the MR rotation was in the opposite direction! I felt I needed a ‘crutch’ to rely on, that would remain a constant.
Here it is:
The moment I discover I have a possible TRCF, I remember the torque setting it happened at. I remind myself that a millisecond before the a/c became ‘unserviceable’ it was under control and flying in the direction I wanted it to fly in. Therefore if I can get back to that Torque setting prior to touchdown, the a/c will be pointing in the direction I require.
Example 1:
Flying straight and level – everything appears normal. I decide to descend (by lowering the collective) and in so doing, the a/c immediately yaws in the same direction of MR rotation without permission. I raise the collective back to the original torque setting and the a/c resumes ‘normal’ again.
I then commence my procedure for dealing with a TRCF i.a.w. my aircraft manual and my experience (or lack of it). However, when I finally wish to land safely at the end of this procedure, I know that by attaining that original torque setting, the a/c will be under some form of ‘recognisable’ flight regime (ie: straight and level).
In the above instance, the malfunction manifests itself at cruise power (say 50% Tq). I must therefore find a way to reproduce a relatively sustained profile at 50% Tq immediately prior to touchdown to achieve a survivable outcome.
Example 2:
I am in the climb where everything appears normal (70% Tq). As I lower the collective to level off, there is an undemanded yaw in the direction of MR rotation. I have a high power TRCF @ 70%. .
Example 3:
I am in the descent to land (30% Tq). I level off and there is an undemanded yaw in the opposite direction of the MR rotation. I have a low power TRCF @ 30%.
In all of the above examples, provided I can reproduce those ‘safe’ Tq settings (30, 50, 70), I will be in a relatively safe flight configuration. Now all I have to do is reproduce those steady states long enough to land:
Low power TRCF:
Where do I witness low power settings in my helo?
Bottom of a normal approach prior to arresting the descent.
Bottom of an auto prior to levelling.
Or if you look at the “KISS” power required curve below – Vy .
Vy varies for different helos but is around 60-70kts.
https://www.dropbox.com/s/hzt232ckxgb7ieq/Prfig2.gif
So, with a low power TRCF, I would initially endeavour to level off by raising the collective and accept the offset yaw in the opposite direction of MR rotation. I would then fly at Vy (minimising power, thus minimising this offset yaw) to a suitable landing strip. On arrival at the landing strip I would then initiate a SHALLOW descent at 60-70 kts (offset yaw reduces even more because you lowered the lever to descend). Prior to and just above the touchdown point, whilst still at 60-70kts, initiate a very gentle and prolonged nose up attitude (I specifically did not mention the word ‘flare’!). Allow the speed to decrease whilst still maintaining a gentle descent to land.
[*WARNING: If you reduce speed too much, you could end up dropping through your descent angle and have to apply collective to restrain the increasing R.O.D which could lead to uncontrollable yaw in the opposite direction to MR rotation and subsequent loss of control of the helo. In low power TRCF therefore be prepared for a relatively fast (50+kt) running landing].
Speed should now be inside the safety parameters for a running landing and either the skids / wheels can be used to maintain straight as you raise the collective to cushion the remaining touchdown, or if you are able (in a single pilot helo) bring the throttle back commensurate with the rate of change of yaw to remain relatively straight. In a twin pilot a/c the other pilot can play with the throttles at this stage.
[The bottom of this approach requires practice if it is to produce a polished outcome, but in an emergency, an unprepared landing without previous practice should still save your life].
Cruise power TRCF:
In the above low power TRCF scenario, I was trying to mimic the Tq I had when the TRCF manifested itself (30%). On the graph, 30% Tq or SHP relates to a minimum speed of Vy (ish).
This time though, with a cruise power TRCF I am looking to achieve 50%. From the graph it appears that the respective speed for this power is slower than Vy (as I move up the y axis from 30 – 50 Tq). So if I employ the same tactics as in the above scenario, at the bottom of the SHALLOW approach I can afford to slow down even more, prior to touchdown by raising the collective further to try to achieve 50% Tq/SHP. The result being that my touchdown speed is even lower than the previous scenario’s final running landing speed.
High Power TRCF:
The “easiest” outcome of them all. Using the same scenario as both of the above and in the best interests of KISS – I now have to go even further up the y axis to find 70% Tq/SHP. This means that at the bottom of my SHALLOW approach, as I begin my progressive nose up attitude immediately prior to touching down, I can bask in the satisfaction of knowing that the collective will need to be raised significantly as I slow down more, and more and more en route to achieving 70 Tq/SHP. In fact I might even (wind permitting) be able to come to a hover, or a (trickle) fwd drift.
In summary:
TRF: Provided the gearbox assembly remains onboard the probable outcome is a land as soon as possible (LASAP) auto and/or an EOL.
TRCF: Memorise the shape of your helicopters power/drag curve and picture where on the Tq axis your malfunction manifested itself and how you are going to return to that figure immediately prior to touch down. LASAP.
Remember: the more you practice this manoeuvre the more likely you will be able to survive it on the day of the race.
Last edited by Thomas coupling; 23rd Feb 2013 at 21:48.

Thread Starter
From DK:
T/R control loss
Mainly for TC ... thanks for the note and wish I could exchange my words for a couple of gold bricks!
To answer your note.
Following recognition of the TRF situation, I teach an immediate reduction in power ... (lever fully lowered) My use of the word 'immediate' depends on the power in use and airframe speed at the moment of failure. High power, low speed ... no upper limit. Low power ... highish speed, the lever can be lowered more leisurely. To enhance the simulation, I also 'induce' some airframe fibration with collective lever 'fluttering.'
Either way, the aim is to regain control and prevent further RIGHT yaw (USA machines) by allowing the airfame to return from 'right to left' past the 'dead ahead' position to establish a steady state descent in the '10 o Clock' position which requires right cyclic. With control regained, a combination of speed and power allows stable flight in the '10 o Clock' position to be established AND/OR a variation in distance flown and rate of descent as necessary.
With a suitable landing site available, a descent is initiated to around 20 - 30 feet AGL at the lowest achievable speed. As the airframe sinks to the surface, collective lever is raised to arrest ROD with a cyclic flare used to reduce forward speed. With the increase in power, airframe commences the original yaw to the RIGHT which is allowed as far as the 'One o Clock' position when throttle is closed for a low speed EOL. Cyclic is pushed forward to co-incide with the airframe approaching the dead ahead 'twelve o Clock' position while allowing the aircraft to partially touch down on the rear skids to assist a dead ahead 'run-on' landing. Even so the airframe is still likely to continue its left yaw, which as noted in a post above, can be minimised using a right cross wind giving greater drag on the right skid.
I hasten to add that my notes must neccessarily apply to the type on which I've experienced my two total T/R failures, being the cable operated Enstrom T/R control system where the failed cable wrapped itself around the T/R to seize the transmission. The other total failure being a straightforward break in the T/R drive shaft.
My 1999 Biggin Hill Air Fare failure being the less difficult left hand CABLE breakage which allowed use of left anti-torque pedal, but leaving no right pedal control for left yaw. I hope these somewhat neccessarily convoluted notes help an understanding of these failures. and I'd happily chat further with interested parties by PMs. Safe flying to all. Dennis K.
T/R control loss
Mainly for TC ... thanks for the note and wish I could exchange my words for a couple of gold bricks!
To answer your note.
Following recognition of the TRF situation, I teach an immediate reduction in power ... (lever fully lowered) My use of the word 'immediate' depends on the power in use and airframe speed at the moment of failure. High power, low speed ... no upper limit. Low power ... highish speed, the lever can be lowered more leisurely. To enhance the simulation, I also 'induce' some airframe fibration with collective lever 'fluttering.'
Either way, the aim is to regain control and prevent further RIGHT yaw (USA machines) by allowing the airfame to return from 'right to left' past the 'dead ahead' position to establish a steady state descent in the '10 o Clock' position which requires right cyclic. With control regained, a combination of speed and power allows stable flight in the '10 o Clock' position to be established AND/OR a variation in distance flown and rate of descent as necessary.
With a suitable landing site available, a descent is initiated to around 20 - 30 feet AGL at the lowest achievable speed. As the airframe sinks to the surface, collective lever is raised to arrest ROD with a cyclic flare used to reduce forward speed. With the increase in power, airframe commences the original yaw to the RIGHT which is allowed as far as the 'One o Clock' position when throttle is closed for a low speed EOL. Cyclic is pushed forward to co-incide with the airframe approaching the dead ahead 'twelve o Clock' position while allowing the aircraft to partially touch down on the rear skids to assist a dead ahead 'run-on' landing. Even so the airframe is still likely to continue its left yaw, which as noted in a post above, can be minimised using a right cross wind giving greater drag on the right skid.
I hasten to add that my notes must neccessarily apply to the type on which I've experienced my two total T/R failures, being the cable operated Enstrom T/R control system where the failed cable wrapped itself around the T/R to seize the transmission. The other total failure being a straightforward break in the T/R drive shaft.
My 1999 Biggin Hill Air Fare failure being the less difficult left hand CABLE breakage which allowed use of left anti-torque pedal, but leaving no right pedal control for left yaw. I hope these somewhat neccessarily convoluted notes help an understanding of these failures. and I'd happily chat further with interested parties by PMs. Safe flying to all. Dennis K.

TC,
Without sounding too critical....you do make some statements that may not be as certain as you present. As written some of your comments border on deadly unless someone with experience knows when to skip along.
If you experience a Tail Rotor failure that leaves you with too much Tail Rotor Thrust.....doing an EOL is the exact wrong thing to do.
Not so fast.....you might experience a complete loss of control along with the shift in CG....but the Exercise is just beginning.....not ENDEX as you suggest.
An IMMEDIATE full reduction of Collective, and if that doesn't work well enough, Engines(s) to Idle.....and attempt to regain control of Pitch/Roll/and see if Yaw control no matter how limited is regained. If you get the aircraft upright and responding to cyclic inputs.....reapply power and collective and see if you can maintain flight(if necessary) and if unable....or if there is a very good place to land.....do an EOL expecting yawing at the Flare/Decel. That might be checked with a bit of collective.
Remember the Bell 412 Crew in the GOM that had a TRGB and Blades depart the aircraft at night over the water. They said they went inverted and spun.....but were able to regain control after bottoming the Collective and rolling the engines to Idle....then were able to fly the aircraft until they decided to carry out an Emergency Landing.
It might be extreme....but don't ever quit flying the aircraft....fly it to impact but fly it.
I prefer the use of the word "Un-commanded" rather than "Un-Controlled" in that the weather vane effect of the Tail Fin might limit the Yaw to a large side slip angle but not wind up in a spinning of the aircraft with a bit of airspeed.....thus is is "controlled" but remains "un-commanded".
Analysis of Tail Rotor failures other than Loss of Components can be a lot simpler than what you set forth.
Power Pedal forward.....Good Day. Power Pedal aft.....Bad Day.
The problems that leave you with too much Tail Rotor thrust can be addressed by reducing Tail Rotor RPM then making a shallow approach to a hover.....during the approach the nose of the aircraft will be off to one side and as the airspeed lessens will begin to come back towards the direction of travel. Hold adequate airspeed to control keep the Nose off to the side until you can get within 1-2 feet of the surface. If you plan the approach to arrive at a very low hover (1-2 feet )....as the Nose centers.....simply lower the Collective and land on.
If you miss judge and the Nose swings past the direction of travel....simply accelerate and try again.
If you have too little Tail Rotor Thrust....the choices are a running landing or an EOL. As groundspeed might be excessive to maintain yaw control and thus make for a very dangerous situation (you are hitting the ground at a very high rate of speed, with full power on the rotor system, and your yaw control is very limited), the EOL offers a lot of advantages. In the EOL you arrive a little or no ground speed, the engines can be in Idle or shutdown, your ROD will be slight after cushioning the landing, and if the aircraft yaws and even if it rolls over....the resulting forces are much less.
Even without a Tail Rotor....the Pilot remains capable of "Controlling" the Yaw of the Helicopter by varying Torque on the Rotor System and Airspeed.
The failure most Pilots make....is not fully understanding the effect of the various controls, levers, throttles, and cyclic have on "Yaw" in their helicopter. This is something that needs practicing, so that when an failure occurs, the initial response is automatic and the subsequent actions are based upon a thorough knowledge of the way the Helicopter reacts to the controls without benefit of the Tail Rotor.
You laid out a lot of information that will certainly get the discussion going....and is an interesting topic for you to bring up.
Without sounding too critical....you do make some statements that may not be as certain as you present. As written some of your comments border on deadly unless someone with experience knows when to skip along.
If you experience a Tail Rotor failure that leaves you with too much Tail Rotor Thrust.....doing an EOL is the exact wrong thing to do.
Catastrophic TRF: If the tail gearbox departs flight, the associated change of CofG will almost certainly cause the aircraft to pitch out of control due to the (weight x moment arm) change caused by the removal of “x” Kg of metal at the end of that moment arm. ENDEX.....
An IMMEDIATE full reduction of Collective, and if that doesn't work well enough, Engines(s) to Idle.....and attempt to regain control of Pitch/Roll/and see if Yaw control no matter how limited is regained. If you get the aircraft upright and responding to cyclic inputs.....reapply power and collective and see if you can maintain flight(if necessary) and if unable....or if there is a very good place to land.....do an EOL expecting yawing at the Flare/Decel. That might be checked with a bit of collective.
Remember the Bell 412 Crew in the GOM that had a TRGB and Blades depart the aircraft at night over the water. They said they went inverted and spun.....but were able to regain control after bottoming the Collective and rolling the engines to Idle....then were able to fly the aircraft until they decided to carry out an Emergency Landing.
It might be extreme....but don't ever quit flying the aircraft....fly it to impact but fly it.
TRF in fwd flight results in uncontrolled yaw in the opposite direction to main rotor rotation.
Analysis of Tail Rotor failures other than Loss of Components can be a lot simpler than what you set forth.
Power Pedal forward.....Good Day. Power Pedal aft.....Bad Day.
The problems that leave you with too much Tail Rotor thrust can be addressed by reducing Tail Rotor RPM then making a shallow approach to a hover.....during the approach the nose of the aircraft will be off to one side and as the airspeed lessens will begin to come back towards the direction of travel. Hold adequate airspeed to control keep the Nose off to the side until you can get within 1-2 feet of the surface. If you plan the approach to arrive at a very low hover (1-2 feet )....as the Nose centers.....simply lower the Collective and land on.
If you miss judge and the Nose swings past the direction of travel....simply accelerate and try again.
If you have too little Tail Rotor Thrust....the choices are a running landing or an EOL. As groundspeed might be excessive to maintain yaw control and thus make for a very dangerous situation (you are hitting the ground at a very high rate of speed, with full power on the rotor system, and your yaw control is very limited), the EOL offers a lot of advantages. In the EOL you arrive a little or no ground speed, the engines can be in Idle or shutdown, your ROD will be slight after cushioning the landing, and if the aircraft yaws and even if it rolls over....the resulting forces are much less.
Even without a Tail Rotor....the Pilot remains capable of "Controlling" the Yaw of the Helicopter by varying Torque on the Rotor System and Airspeed.
The failure most Pilots make....is not fully understanding the effect of the various controls, levers, throttles, and cyclic have on "Yaw" in their helicopter. This is something that needs practicing, so that when an failure occurs, the initial response is automatic and the subsequent actions are based upon a thorough knowledge of the way the Helicopter reacts to the controls without benefit of the Tail Rotor.
You laid out a lot of information that will certainly get the discussion going....and is an interesting topic for you to bring up.
Last edited by SASless; 26th Feb 2013 at 14:54.
TC
Curious and I know it will depend upon type but when is the tail rotor actually doing nothing ?
Is it in the cruise when pedals are together ? If that is the case to simulate the tail rotor actually stopping is it as easy to put pedals together and say there you go ?
Curious and I know it will depend upon type but when is the tail rotor actually doing nothing ?
Is it in the cruise when pedals are together ? If that is the case to simulate the tail rotor actually stopping is it as easy to put pedals together and say there you go ?
Pedals in Neutral are at the point where the Tail Fin is working at its best to streamline the aircraft due to weather vane effect....thus requiring the least thrust from the Tail Rotor. The Tail Rotor is also helping in that regard despite being in a neutral position.
For training purposes I use two positions for the pedals.
To make it Ambidextrous....Left and Right Turning Rotor Systems.....Power Pedal is the one you push forward to counter-act increased Torque.
Power On.....Perform a Max Performance Takeoff pulling more than Hover Power.....and lock the pedals at the max travel required to trim the aircraft as you begin the takeoff and have the maximum power applied. Continue around the pattern and land.
Power Off (Loss of Thrust-Loss of Components)....apply up to 80-90% Power Off Pedal. Depending upon amount of yaw.....either a running landing or EOL as required.
For Bell Helicopters....using manual control of the throttle and flying down the runway following a Tar Joint or painted line....and controlling the Yaw by throttle alone is a very good exercise. Some parts of the USA....you can follow a fence line for miles and miles.
For training purposes I use two positions for the pedals.
To make it Ambidextrous....Left and Right Turning Rotor Systems.....Power Pedal is the one you push forward to counter-act increased Torque.
Power On.....Perform a Max Performance Takeoff pulling more than Hover Power.....and lock the pedals at the max travel required to trim the aircraft as you begin the takeoff and have the maximum power applied. Continue around the pattern and land.
Power Off (Loss of Thrust-Loss of Components)....apply up to 80-90% Power Off Pedal. Depending upon amount of yaw.....either a running landing or EOL as required.
For Bell Helicopters....using manual control of the throttle and flying down the runway following a Tar Joint or painted line....and controlling the Yaw by throttle alone is a very good exercise. Some parts of the USA....you can follow a fence line for miles and miles.
Last edited by SASless; 26th Feb 2013 at 15:07.
TC
you stated......
"Catastrophic TRF: If the tail gearbox departs flight, the associated change of CofG will almost certainly cause the aircraft to pitch out of control due to the (weight x moment arm) change caused by the removal of “x” Kg of metal at the end of that moment arm. ENDEX..... "
I'm very much with SAS on this one.
The following NTSB report should be mandatory reading.
http://dms.ntsb.gov/aviation/Acciden...2013120000.pdf
It clearly shows that loss of T/R and TRGB (and half the vertical fin in this case) is still controllable!
JJ
you stated......
"Catastrophic TRF: If the tail gearbox departs flight, the associated change of CofG will almost certainly cause the aircraft to pitch out of control due to the (weight x moment arm) change caused by the removal of “x” Kg of metal at the end of that moment arm. ENDEX..... "
I'm very much with SAS on this one.
The following NTSB report should be mandatory reading.
http://dms.ntsb.gov/aviation/Acciden...2013120000.pdf
It clearly shows that loss of T/R and TRGB (and half the vertical fin in this case) is still controllable!
JJ
SAS
Whilst I'm with you 100% on the rest of your post; this bit is a bit of a struggle for me -
"Power Pedal forward.....Good Day. Power Pedal aft.....Bad Day."
Great with a proper throttle ( especially if its on the collective), but these all too common modern aircraft with fancy FADECs don't allow any control of the RRPM.
JJ
Whilst I'm with you 100% on the rest of your post; this bit is a bit of a struggle for me -
"Power Pedal forward.....Good Day. Power Pedal aft.....Bad Day."
Great with a proper throttle ( especially if its on the collective), but these all too common modern aircraft with fancy FADECs don't allow any control of the RRPM.
JJ
True.....but you can beep the engine down as much as you can. In a twin...shut one engine down and minimum beep the other. The goal is to slow the tail rotor as much as you can.
I also remind folks that the Green Arc is "Normal Operations"....and that a Tail Rotor Failure is not a "Normal Operation".
In an ideal world....you should be able to reduce the ground speed to a point that you do a landing with some forward speed...controlling the yaw with collective input as you slowly lower the collective to "brake".
The key is to touch down as the nose comes in line with the direction of travel.
I also remind folks that the Green Arc is "Normal Operations"....and that a Tail Rotor Failure is not a "Normal Operation".
In an ideal world....you should be able to reduce the ground speed to a point that you do a landing with some forward speed...controlling the yaw with collective input as you slowly lower the collective to "brake".
The key is to touch down as the nose comes in line with the direction of travel.
Last edited by SASless; 26th Feb 2013 at 15:20.
Join Date: Dec 2004
Location: canada
Posts: 100
Likes: 0
Received 0 Likes
on
0 Posts
Jelly,
with FADEC (on the 407 anyways), you still have full control of the RRPM while in Auto -mode.., just roll the throttle back.
How else are you be able to acheive ground idle, or 100% from ground idle??
with FADEC (on the 407 anyways), you still have full control of the RRPM while in Auto -mode.., just roll the throttle back.
How else are you be able to acheive ground idle, or 100% from ground idle??
Last edited by 407 too; 26th Feb 2013 at 15:34.
I used to hear a similar argument about Power Levers....but reminded folks I had done these drills in BO/BK/76's single pilot....fraught with peril but do-able as if one is to instruct in the machine....you do have to be able to do it and demonstrate the maneuver to the Student.
SASless
thanks for that but in reality is there actually a position where the tail rotor is actually doing no work. Lots have said look where it is in zero pitch which is actually easier said than done as it will depend upon how the blade is constructed
thanks for that but in reality is there actually a position where the tail rotor is actually doing no work. Lots have said look where it is in zero pitch which is actually easier said than done as it will depend upon how the blade is constructed
Join Date: Jun 2007
Location: foot of a mountain
Posts: 293
Likes: 0
Received 0 Likes
on
0 Posts
On the AS350 Arriel 2(either 1 or 2 EECU) despite the electronics you can go to ground idle using the twist grip on the collective. That includes the old B3 with the single channel EECU as the flt to gnd on the throttle(twist grip) is always available and in all B3's ground idle is ensured via the forced idle microswitch which gives the pilot authority despite the computers so engine goes to ground idle. Biggest problem in the old B3 and B3+ premod is getting back to flight if the out of ground switch fail during training and the engine remains at ground instead of going back to flight and you didnt select a landing site as the ground idle position is always assured and priority if the pilot selects it incase of a emergency.
With the 350's pedals centred on a B2 and B3 definately and some BA's and B's dependant whether the 355 TR blade is fitted, you already have 10degree pitch as the blade is offset 10 degrees positive to the spar.
With the 350's pedals centred on a B2 and B3 definately and some BA's and B's dependant whether the 355 TR blade is fitted, you already have 10degree pitch as the blade is offset 10 degrees positive to the spar.
Last edited by victor papa; 26th Feb 2013 at 16:15.
Thread Starter

My thanks to the likes of SAS and JJ, one never stops learning and to discover several things whilst compiling this thread was amazing. First was that there are singles out there that drive the TR from the engine (AS350) - why Aerospatiale built it this way astounds me as it inherits more problems than it resolves and secondly, that some helos can survive a total loss of tail rotor structurally and still survive - thanks to all.
However guys, this particular thread was meant to be FOR BEGINNERS
 - to gently break them in and you lot have descended on it with technical descriptions of this that and the other which is enough to put any R22, Enstrom pilot off for life!
- to gently break them in and you lot have descended on it with technical descriptions of this that and the other which is enough to put any R22, Enstrom pilot off for life! By all means correct or add or whatever but please please please KISS guys, so the sub 500hr makey learney doesn't get blown away with the complexities of beeping back on one engine to reduce TRE so as to follow fences for half a mile whilst yawed off differentially in auto reading the oxford english dictionary

KISS
Last edited by Thomas coupling; 26th Feb 2013 at 17:36.
Join Date: Dec 2011
Location: Oregon, US
Posts: 155
Likes: 0
Received 0 Likes
on
0 Posts
Not to beat a dead horse or beat up on TC but...
Just this month a R44 lost t/r gearbox in flight and landed safely:
http://dms.ntsb.gov/aviation/Acciden...2013120000.pdf
Good info all around!
Just this month a R44 lost t/r gearbox in flight and landed safely:
http://dms.ntsb.gov/aviation/Acciden...2013120000.pdf
Good info all around!
Join Date: Jun 2007
Location: foot of a mountain
Posts: 293
Likes: 0
Received 0 Likes
on
0 Posts
TC, I appreciate what the thread stands for. However, it is important that low time guys also knows the facts and theory behind the basic and it is not that complicated. For instance, you make a stand against the 350 design that might scare some when reality is it is a multi million fleet hour design with plenty hours flown where no other machine can so surely they have the right to the facts as well. We have now established the myth that FADEC prevents the pilot going to ground idle is a myth on both 407 and 350! The 350 gets lots of critisism without taking into account the percentage of failures vs hours flown nevermind the circumstances in which the average machine flies. Younwanna fly a helicopter you need to know and understand it!
VP
There's no myth that you can't take a FADEC engine to idle when in flight. The problem lies with the bits in between idle and flight rpm when the pilot wishes to reduce the T/R RPM partially to reduce its thrust.
TC
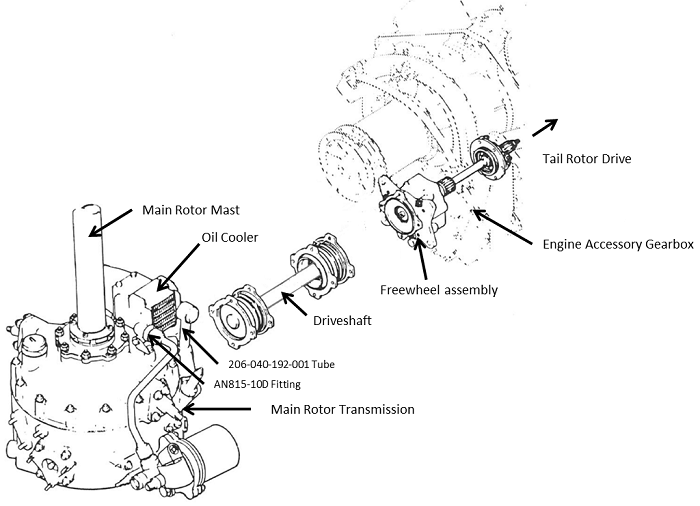
Another helicopter that drives the T/R from the engine is, wait for it.......... pehaps the most prolific light turbine engined helicoper ever produced, the Bell 206 Jet Ranger.
So it's not peculiar to the AS350, far from it.
JJ
There's no myth that you can't take a FADEC engine to idle when in flight. The problem lies with the bits in between idle and flight rpm when the pilot wishes to reduce the T/R RPM partially to reduce its thrust.
TC
Another helicopter that drives the T/R from the engine is, wait for it.......... pehaps the most prolific light turbine engined helicoper ever produced, the Bell 206 Jet Ranger.
So it's not peculiar to the AS350, far from it.
JJ
Who knew? 

B206, B206L are effectively the same.
Don't get started on the SK76 and its issues as well. Remember the days of one engine driving the MR and one driving the TR?
First was that there are singles out there that drive the TR from the engine (AS350) - why Aerospatiale built it this way astounds me as it inherits more problems than it resolves
B206, B206L are effectively the same.
Don't get started on the SK76 and its issues as well. Remember the days of one engine driving the MR and one driving the TR?
Thread Starter
Victor Papa: chill out for goodness sake. I'm not slagging the bl**dy squirrel off, far from it.
Secondly my comments re the 350 are and remain outside the main thread. IF newbies had read this first post only as it was meant to be read, there would have been no reference to the 350.
Why can't readers appreciate this post for what it is - a beginners introduction only. If people like you want to make a meal out of it, go to the other tail rotor thread.
I've flown the Gaz and the twinstar for thousands and thousands of hours. I have 11 types on my licence, twins and singles and all but 1 of them drive their TRGB from the MRGB!
My observation is: why does an a/c designer complicate matters by driving the TR from the engine?
If you drove it from the MGB, you wouldn't need to worry about hi speed shaft failures as the MGB would carry on regardless and drive the TRGB. No need to design in coll anticipators/fadec bypasses/overspeeding FPT's - call it what you want. Shaft fails, enter auto, the end.
Whats strange is Aerospatiale built both the Gaz piece and the As350??
You seem to know everything - answer this?
Secondly my comments re the 350 are and remain outside the main thread. IF newbies had read this first post only as it was meant to be read, there would have been no reference to the 350.
Why can't readers appreciate this post for what it is - a beginners introduction only. If people like you want to make a meal out of it, go to the other tail rotor thread.
I've flown the Gaz and the twinstar for thousands and thousands of hours. I have 11 types on my licence, twins and singles and all but 1 of them drive their TRGB from the MRGB!
My observation is: why does an a/c designer complicate matters by driving the TR from the engine?
If you drove it from the MGB, you wouldn't need to worry about hi speed shaft failures as the MGB would carry on regardless and drive the TRGB. No need to design in coll anticipators/fadec bypasses/overspeeding FPT's - call it what you want. Shaft fails, enter auto, the end.
Whats strange is Aerospatiale built both the Gaz piece and the As350??
You seem to know everything - answer this?
TC
"My observation is: why does an a/c designer complicate matters by driving the TR from the engine?"
My own observation is that far from complicating matters, the AS350 and B206 actually simplify things. For a single-engined heli with the engine aft of the M/R transmission, in order to drive the T/R as you consider best, it would mean doubling up on drive shafts and complicating the MRGB to generate a T/R drive coupling. In the case of the Gazelle, as well as the extra drive shaft and the more complex MRGB, it also has an additional intermediate inclined g'box to route the T/R drive under the engine. All this adds extra components, building in failure points, but most importantly, extra weight. Furthermore, an independant T/R driveshaft passing under the engine means the engine has to be mounted higher reducing clearance from the main rotor, making the C og G higher and increasing panel sizes to cover the engine.
In the AS350 and B206, the design is simple, light-weight, compact and reliable. All the talk of Short shaft / High speed shaft failures is mainly theory as on the whole, as VP asserts, these failures are extremely rare in any case.
JJ
"My observation is: why does an a/c designer complicate matters by driving the TR from the engine?"
My own observation is that far from complicating matters, the AS350 and B206 actually simplify things. For a single-engined heli with the engine aft of the M/R transmission, in order to drive the T/R as you consider best, it would mean doubling up on drive shafts and complicating the MRGB to generate a T/R drive coupling. In the case of the Gazelle, as well as the extra drive shaft and the more complex MRGB, it also has an additional intermediate inclined g'box to route the T/R drive under the engine. All this adds extra components, building in failure points, but most importantly, extra weight. Furthermore, an independant T/R driveshaft passing under the engine means the engine has to be mounted higher reducing clearance from the main rotor, making the C og G higher and increasing panel sizes to cover the engine.
In the AS350 and B206, the design is simple, light-weight, compact and reliable. All the talk of Short shaft / High speed shaft failures is mainly theory as on the whole, as VP asserts, these failures are extremely rare in any case.
JJ