


Explain lead-lag in a rigid rotor to me?

Thread Starter
Join Date: Sep 2006
Location: Los Angeles, USA
Age: 52
Posts: 1,631
Likes: 0
Received 0 Likes
on
0 Posts
Explain lead-lag in a rigid rotor to me?
I understand the basics of lead-lag in a articulated or semi-rigid rotor: Basically as the advancing blade creates more lift, it is allowed to rise and therefore produce less lift. But in doing so it's CG changes inwards (just like an ice skater tucking their arms in - their RPM will increase) and will want to increase its speed. Therefore the advancing blade must allowed to hinge forward to accomodate this speed increase.
So far so good.
But in a rigid rotor system, it's my understanding that this is taken care of within the blade itself, by it being somewhat elastic. Fair enough. What I don't understand is this: how is this rise in the blade induced in the first place? If it's induced cyclically, then that means that the helicopter will have different cyclical behaviour depending on if it's hovering or moving forward - this has to be compensated for mechanically somehow or else the chopper would roll over the minute it went into translational lift. How's this done?. If not, then how does the advancing blade "know" it want's to go high and reduce lift?
Also, there has been some talk about ARR (absolute rigid rotor) systems - how would they work? What would the results be for a rotorsystem that is so stiff that it won't move in any way? Could it be flyable? What would the benefits be?
So far so good.
But in a rigid rotor system, it's my understanding that this is taken care of within the blade itself, by it being somewhat elastic. Fair enough. What I don't understand is this: how is this rise in the blade induced in the first place? If it's induced cyclically, then that means that the helicopter will have different cyclical behaviour depending on if it's hovering or moving forward - this has to be compensated for mechanically somehow or else the chopper would roll over the minute it went into translational lift. How's this done?. If not, then how does the advancing blade "know" it want's to go high and reduce lift?
Also, there has been some talk about ARR (absolute rigid rotor) systems - how would they work? What would the results be for a rotorsystem that is so stiff that it won't move in any way? Could it be flyable? What would the benefits be?

Adam says:
"I understand the basics of lead-lag in a articulated or semi-rigid rotor"
Sorry, no, you don't. Articulated, perhaps, but the teetering head is different, there is no lead-lag. There is a special underslung hinge to compensate for the speed-up effect, so it is minimal. The blades do not move laterally relative to each other - imagine the imbalance when both blades were on the same side of the circle.
"this has to be compensated for mechanically somehow or else the chopper would roll over the minute it went into translational lift. How's this done?"
It's called Flapping to Equality, and it does it all by itself, as the blades are flexible in the flapping axis. Lead-lag stresses are absorbed by the blades, and the hub is amazingly strong. Look at a BK117 hub to confirm.
And please read a book about all this - takes up too much bandwidth to explain it.
"I understand the basics of lead-lag in a articulated or semi-rigid rotor"
Sorry, no, you don't. Articulated, perhaps, but the teetering head is different, there is no lead-lag. There is a special underslung hinge to compensate for the speed-up effect, so it is minimal. The blades do not move laterally relative to each other - imagine the imbalance when both blades were on the same side of the circle.
"this has to be compensated for mechanically somehow or else the chopper would roll over the minute it went into translational lift. How's this done?"
It's called Flapping to Equality, and it does it all by itself, as the blades are flexible in the flapping axis. Lead-lag stresses are absorbed by the blades, and the hub is amazingly strong. Look at a BK117 hub to confirm.
And please read a book about all this - takes up too much bandwidth to explain it.

Join Date: Apr 2003
Location: Vancouver, BC, Canada
Posts: 1,635
Likes: 0
Received 0 Likes
on
0 Posts
AdamFrisch,
This Web site should provide an understanding of the rotor, both teetering and rigid.
http://www.dynamicflight.com/aerodynamics/
The 'Absolutely' Rigid Rotor helicopter requires two rotors. This is so that the lift of the advancing side on one rotor is matched by the lift of the advancing side of the other, counter-rotating, rotor.
Hope this helps.
Dave
This Web site should provide an understanding of the rotor, both teetering and rigid.
http://www.dynamicflight.com/aerodynamics/
The 'Absolutely' Rigid Rotor helicopter requires two rotors. This is so that the lift of the advancing side on one rotor is matched by the lift of the advancing side of the other, counter-rotating, rotor.
Hope this helps.
Dave
Join Date: Jul 2003
Location: Port Townsend,WA. USA
Posts: 440
Likes: 0
Received 0 Likes
on
0 Posts
Adam,
Sounds to me like you have a pretty good basic understanding of some helicopter theory regardless of Ascend Charlie's comments. If AC doesn't have the time he should skip past the question.
Here is my take-
The term "Rigid Rotor" is very confusing. "Hingeless rotor" is a better description because the so-called rigid rotor is not really rigid. The "rigid rotor" is actually designed to allow flex near the hub. So the word "rigid" should not be used anymore but it still persists.
Confused?
The books are sometimes hard to understand and often wrong, all you can do is keep trying.
Sounds to me like you have a pretty good basic understanding of some helicopter theory regardless of Ascend Charlie's comments. If AC doesn't have the time he should skip past the question.
Here is my take-
The term "Rigid Rotor" is very confusing. "Hingeless rotor" is a better description because the so-called rigid rotor is not really rigid. The "rigid rotor" is actually designed to allow flex near the hub. So the word "rigid" should not be used anymore but it still persists.
Confused?
The books are sometimes hard to understand and often wrong, all you can do is keep trying.
Combine Operations
Join Date: May 2005
Location: U.K.
Posts: 687
Likes: 0
Received 0 Likes
on
0 Posts
"Hingeless rotor"
Adam, if you imagine the blade roots as being flexible, does that help? Normal flapping forces are exerted on the blades, and are absorbed in the blade roots. Coriolis effect then applies the lead/lag forces, which are again taken up in the blade roots.
Join Date: Aug 2006
Location: Below Escape Velocity
Posts: 416
Likes: 0
Received 0 Likes
on
0 Posts

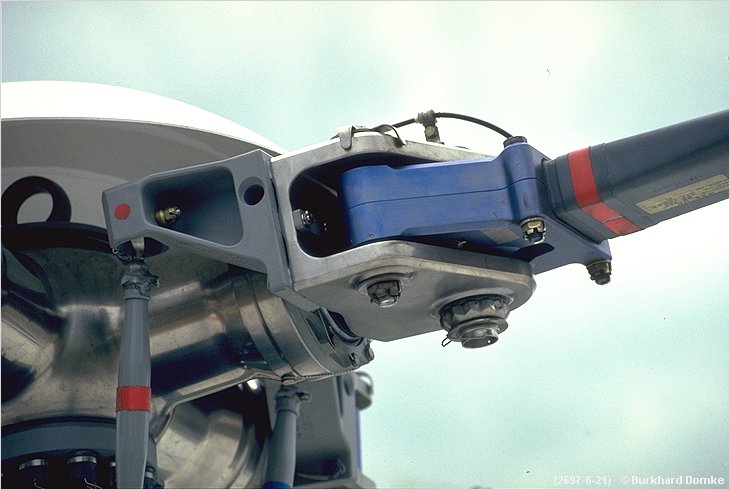
There are various systems. This is a Eurocopter/Aerospatiale StarFlex of some 25-years vintage.
If you look at the rectangular-shaped bits with the colored tape on them sandwiching the blade roots, those we used to call the 'blade grips' (your terminology may vary wherever you live). Their purpose is to hold the blade to the hub. They are permitted motion in the flapping axis and to some degree in the lead-lag axis and to allow the blade to rotate about its axis for desired pitch change (which is why you'll see the pitch change horns attached to them. The two heavy vertical pins go right through the blade root and are secured in place by the nappy pin (no, really).
The star-shaped bit in sandwiched inside there is the 'star'. It is rather flexible, though it doesn't look like it is. It flexes all over the place to allow for coning and pitch changes. It is as close to INflexible as possible in the lead-lag axis. The tip of the star, which you can't really see, is a cylindrical machined bearing surface that plugs into the center of our next bit.
Those squshy-looking green blocks are the 'frequency adaptors'. They are the secret to lead-lag. They permit lead and lag by smushing on their leading and lagging sides (as appropriate) and applying a re-centering force when aerodynamic forces are more equal. All these composite parts need a good going-over now and again to check that the materials aren't breaking down since most of the pieces are completing at least one flexing or bending cycle per turn of the head... lots of potential for fatigue failure.
Works a treat... and... somebody thought of it!

Join Date: Jul 2003
Location: Port Townsend,WA. USA
Posts: 440
Likes: 0
Received 0 Likes
on
0 Posts
Um...Lifting...
Terrific description with a pic! Thanks.
Couple questions:
1) Is there a steel ball or roller bearing inside that squishy green block for feathering or is the block the bearing?
2) Would the block be called an "elastomeric bearing"?
3) Is the block hard rubber or urethane?
4) Does the green block take the radial outward (Centrifugal)loads.
Hope thats not too many quetions, this is very interesting.
Thanks
slowrotor
Terrific description with a pic! Thanks.
Couple questions:
1) Is there a steel ball or roller bearing inside that squishy green block for feathering or is the block the bearing?
2) Would the block be called an "elastomeric bearing"?
3) Is the block hard rubber or urethane?
4) Does the green block take the radial outward (Centrifugal)loads.
Hope thats not too many quetions, this is very interesting.
Thanks
slowrotor
Pretty close but you left out the spherical elastomeric bearing which is hiding in the fat bit of the star near the centre, where the sleeves (read grips if you want) attach and also another bearing inside the "Frequency adapter".
Later on they figured you didn't need a star at all and you can see the elastomeric bearing better. The round black bit. The grey bit with the blue tape around replaces the green block on UL's pic for L/L damping.

And this definitely is rigid but everything happens in the blade except pitching.
And this one is "bearingless" (well nearly anyway)

And then the Flintstones got involved:
Couple of big lumps of carbon fibre! Actually hand laid in a plywood box - have seen it done. Cutting and curing the carbon was a little more high tech though.

And if you watch this lot getting to this point, you would never get in a helicopter again! Looks about as complicated as it could get.

Slow and Adam, try getting hold of an AS350 Maintenance Training manual. It explains it all very well.

Later on they figured you didn't need a star at all and you can see the elastomeric bearing better. The round black bit. The grey bit with the blue tape around replaces the green block on UL's pic for L/L damping.
And this definitely is rigid but everything happens in the blade except pitching.
And this one is "bearingless" (well nearly anyway)
And then the Flintstones got involved:
Couple of big lumps of carbon fibre! Actually hand laid in a plywood box - have seen it done. Cutting and curing the carbon was a little more high tech though.
And if you watch this lot getting to this point, you would never get in a helicopter again! Looks about as complicated as it could get.
Slow and Adam, try getting hold of an AS350 Maintenance Training manual. It explains it all very well.
Join Date: Aug 2006
Location: Below Escape Velocity
Posts: 416
Likes: 0
Received 0 Likes
on
0 Posts
1) I seem to remember there's a kind of a tight-fitting sleeve bearing inside the block so that the blade could rotate about its long axis (feather). I think there actually is an old retired star floating around here somewhere here at work getting rained on and so forth. The tips of the stars sort of reshape into a cylindrical cross-section for insertion into the block.
2) Well, we called them "frequency adapters" but from what I remember it was an elastomeric compound that flexed to provide lead/lag.
3) I think the composition has changed over time to improve durability. I seem to remember they were some kind of composite synthetic rubber stuff with some carbon thrown in there, but I'm not a maintenance guy, I just fly the Dauphin (same head basically, just another blade).
4) I don't think so. You drop one on the concrete, it will bounce a bit, and you can very slightly dent them with your fingernail, they're softer than I imagined they'd be. I don't believe there's any thrust load on them at all. If you look at the blade grips, they're very herky in linear compression and tension. The blade retention pins (the thick dark vertical pins) are serious hunks of metal and are supposed to be pulled, cleaned, inspected, lubricated, and reinserted quite frequently (I don't know the interval) They're quite strong in shear. I don't remember how the grips are attached inside the head, but if I hunt around, I might find an illustration.
RVDT- Thanks for that, couldn't remember the way the bearings were set up. Actually, I think once you understand how the old heads work, more or less, the new ones are easier to understand. While I haven't flown any of the heads you illustrated, it's easy enough to tell what all the bits do (or don't do).
Sleeves, grips, all one to me (probably a bad habit from Bells, where the similar bit is called a grip). We spent the better part of a decade peeling off all the French warning labels on Le Dauphin and replacing them with Anglais "the Dolphin".
2) Well, we called them "frequency adapters" but from what I remember it was an elastomeric compound that flexed to provide lead/lag.
3) I think the composition has changed over time to improve durability. I seem to remember they were some kind of composite synthetic rubber stuff with some carbon thrown in there, but I'm not a maintenance guy, I just fly the Dauphin (same head basically, just another blade).
4) I don't think so. You drop one on the concrete, it will bounce a bit, and you can very slightly dent them with your fingernail, they're softer than I imagined they'd be. I don't believe there's any thrust load on them at all. If you look at the blade grips, they're very herky in linear compression and tension. The blade retention pins (the thick dark vertical pins) are serious hunks of metal and are supposed to be pulled, cleaned, inspected, lubricated, and reinserted quite frequently (I don't know the interval) They're quite strong in shear. I don't remember how the grips are attached inside the head, but if I hunt around, I might find an illustration.
RVDT- Thanks for that, couldn't remember the way the bearings were set up. Actually, I think once you understand how the old heads work, more or less, the new ones are easier to understand. While I haven't flown any of the heads you illustrated, it's easy enough to tell what all the bits do (or don't do).
Sleeves, grips, all one to me (probably a bad habit from Bells, where the similar bit is called a grip). We spent the better part of a decade peeling off all the French warning labels on Le Dauphin and replacing them with Anglais "the Dolphin".
Avoid imitations
Join Date: Nov 2000
Location: Wandering the FIR and cyberspace often at highly unsociable times
Posts: 14,573
Received 419 Likes
on
221 Posts
Juan De Cierva reputedly discovered flapping to equality accidentally. He initially made autogyro models with cane and feather rotor blades, which supported themselves nicely on the ground as they were light and relatively springy.
Little did he know that they also coned and flapped to equality nicely despite the fact that he had no hub hinges. This was because the blade spars were flexible along their length.
Later, when he began building larger aircraft he used fixed wing fuselages converted to hold a rotor mast and big, heavy blades (he had to use whatever materials he could - heavy wood was the only composite fibre in those days). He still had no hinges. His only concern was that the blades drooped very markedly at rest, because of their own weight. To cure this problem he fitted a "King post" above the centre of the rotor hub and fitted bracing wires top and bottom along the blades to hold them in what he thought was the correct flying attitude.
The first time the aircraft reached flying speed, it rolled over. He had actually built a rigid rotor but had no way of controlling it. All the feedback forces from dis-symmetry of lift across the disc went into the rotor head, causing roll. He went back to looking at his scale models to ponder why this happened. Once he realised and removed the king post and bracing wires, allowing the blades to flap, they flew to equality, just like his small models. The problem was solved.
Little did he know that they also coned and flapped to equality nicely despite the fact that he had no hub hinges. This was because the blade spars were flexible along their length.
Later, when he began building larger aircraft he used fixed wing fuselages converted to hold a rotor mast and big, heavy blades (he had to use whatever materials he could - heavy wood was the only composite fibre in those days). He still had no hinges. His only concern was that the blades drooped very markedly at rest, because of their own weight. To cure this problem he fitted a "King post" above the centre of the rotor hub and fitted bracing wires top and bottom along the blades to hold them in what he thought was the correct flying attitude.
The first time the aircraft reached flying speed, it rolled over. He had actually built a rigid rotor but had no way of controlling it. All the feedback forces from dis-symmetry of lift across the disc went into the rotor head, causing roll. He went back to looking at his scale models to ponder why this happened. Once he realised and removed the king post and bracing wires, allowing the blades to flap, they flew to equality, just like his small models. The problem was solved.

Avoid imitations
Join Date: Nov 2000
Location: Wandering the FIR and cyberspace often at highly unsociable times
Posts: 14,573
Received 419 Likes
on
221 Posts
Pilots would be friggin' in the riggin' and we'd be all Osprey pilots by now?
Join Date: Nov 2004
Location: Cambridgeshire, UK
Posts: 1,334
Likes: 0
Received 0 Likes
on
0 Posts
Good thread...
RVDT, enjoyed reading your post!
One question about the EC-135 bearingless rotors: What are those red cylinders above and below the blade roots?
Mart
One question about the EC-135 bearingless rotors: What are those red cylinders above and below the blade roots?
Mart
snubbers
Mart,
Those look like snubbers to me. Keeps the flexbeam centered in the torque tube at the root end.
-- IFMU
Those look like snubbers to me. Keeps the flexbeam centered in the torque tube at the root end.
-- IFMU
Join Date: Jul 2003
Location: Port Townsend,WA. USA
Posts: 440
Likes: 0
Received 0 Likes
on
0 Posts
Nice internal view of the EC 120B rotor head here:
http://www.eurocopter.com/ec120/frotorhead.html
http://www.eurocopter.com/ec120/frotorhead.html
Graviman,
Lead lag dampers. As you can see there is no rotorhead on this aircraft. All the elements are in the blade.
It is fully articulated, nearly bearingless, and has a very large flapping hinge offset which gives you plenty of control power.
Inside the inboard cuff section, there are 4 beams which are composite (fibre glass) and integral with the blade. The fibre elements of these beams run from the tip of the blade to the root fitting and back to the tip again. Now, within the cuff section the beams shape changes to give you the equivalent function where bearings were once used. Inboard there is a flapping section because thats were it will due to the shape at that point of the beam, then there is a section which is soft in the torsion (twisting) plane, and finally near the outer section of the cuff there is a lead lag section, although these last functions probably overlap to a large extent. Please note the cuff itself serves none of these functions, it is there to provide pitch control and also provides a mechanical connection to allow lead lag damping.

This is from an "experimental" 5 blade EC145 and is very similar to the 135. Where it points to lead lag hinge it is refering to the flexelement within the cuff not the cuff itself.
When I say "nearly" bearingless, there is a support between the two dampers which provides a pivot point for pitch control and damping which has a small spherical bearing in it.
The arrangement on the Bell 430 is not much different to this.
Lead lag dampers. As you can see there is no rotorhead on this aircraft. All the elements are in the blade.
It is fully articulated, nearly bearingless, and has a very large flapping hinge offset which gives you plenty of control power.
Inside the inboard cuff section, there are 4 beams which are composite (fibre glass) and integral with the blade. The fibre elements of these beams run from the tip of the blade to the root fitting and back to the tip again. Now, within the cuff section the beams shape changes to give you the equivalent function where bearings were once used. Inboard there is a flapping section because thats were it will due to the shape at that point of the beam, then there is a section which is soft in the torsion (twisting) plane, and finally near the outer section of the cuff there is a lead lag section, although these last functions probably overlap to a large extent. Please note the cuff itself serves none of these functions, it is there to provide pitch control and also provides a mechanical connection to allow lead lag damping.
This is from an "experimental" 5 blade EC145 and is very similar to the 135. Where it points to lead lag hinge it is refering to the flexelement within the cuff not the cuff itself.
When I say "nearly" bearingless, there is a support between the two dampers which provides a pivot point for pitch control and damping which has a small spherical bearing in it.
The arrangement on the Bell 430 is not much different to this.
Avoid imitations
Join Date: Nov 2000
Location: Wandering the FIR and cyberspace often at highly unsociable times
Posts: 14,573
Received 419 Likes
on
221 Posts
So, after all these years, designers have gone back to the same principles that Cierva used on his original scale models - bendy blades, albeit a lot stronger than cane and feathers!
